Экспоненциальная корреляционная функция. Парная регрессия и корреляция. Корреляционный анализ в Excel
Асламазов Л.Г. Движение по окружности // Квант. - 1972. - № 9. - С. 51-57.
По специальной договоренности с редколлегией и редакцией журнала «Квант»
Для описания движения по окружности наряду с линейной скоростью вводят понятие угловой скорости. Если точка при движении по окружности за время Δt описывает дугу, угловая мера которой Δφ, то угловая скорость .
Угловая скорость ω связана с линейной скоростью υ соотношением υ = ω·r , где r - радиус окружности, по которой движется точка (рис. 1). Понятие угловой скорости особенно удобно для описания вращения твердого тела вокруг оси. Хотя линейные скорости у точек, находящихся на разном расстоянии от оси, будут неодинаковыми, их угловые скорости будут равны, и можно говорить об угловой скорости вращения тела в целом.

Задача 1 . Диск радиуса r катится без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянная и равна υ п. С какой угловой скоростью при этом вращается диск?
Каждая точка диска участвует в двух движениях - в поступательном движении со скоростью υ п вместе с центром диска и во вращательном движении вокруг центра с некоторой угловой скоростью ω.
Для нахождения ω воспользуемся отсутствием проскальзывания, то есть тем, что в каждый момент времени скорость точки диска, соприкасающейся с плоскостью, равна нулю. Это означает, что для точки А (рис. 2) скорость поступательного движения υ п равна по величине и противоположна по направлению линейной скорости вращательного движения υ вр = ω·r . Отсюда сразу получаем .

Задача 2. Найти скорости точек В , С и D того же диска (рис. 3).

Рассмотрим вначале точку В
. Линейная скорость ее вращательного движения направлена вертикально вверх и равна ![]() , то есть по величине равна скорости поступательного движения, которая, однако, направлена горизонтально. Складывая векторно эти две скорости, находим, что результирующая скорость υ B
по величине равна и образует угол 45º с горизонтом. У точки С
скорости вращательного и поступательного движения направлены в одну сторону. Результирующая скорость υ C
равна 2υ п и направлена горизонтально. Аналогично находится и скорость точки D
(см. рис. 3).
, то есть по величине равна скорости поступательного движения, которая, однако, направлена горизонтально. Складывая векторно эти две скорости, находим, что результирующая скорость υ B
по величине равна и образует угол 45º с горизонтом. У точки С
скорости вращательного и поступательного движения направлены в одну сторону. Результирующая скорость υ C
равна 2υ п и направлена горизонтально. Аналогично находится и скорость точки D
(см. рис. 3).
Даже в том случае, когда скорость точки, движущейся по окружности, не меняется по величине, точка имеет некоторое ускорение, так как меняется направление вектора скорости. Это ускорение называется центростремительным . Оно направлено к центру окружности и равно (R - радиус окружности, ω и υ - угловая и линейная скорости точки).
Если же скорость точки, движущейся по окружности, меняется не только по направлению, но и по величине, то наряду с центростремительным ускорением существует и так называемое тангенциальное ускорение. Оно направлено по касательной к окружности и равно отношению (Δυ - изменение величины скорости за время Δt ).
Задача 3. Найти ускорения точек А , В , С и D диска радиуса r , катящегося без проскальзывания по горизонтальной плоскости. Скорость центра диска постоянна и равна υ п (рис. 3).
В системе координат, связанной с центром диска, диск вращается с угловой скоростью ω, а плоскость движется поступательно со скоростью υ п. Проскальзывание между диском и плоскостью отсутствует, следовательно, . Скорость поступательного движения υ п не меняется, поэтому угловая скорость вращения диска постоянная и точки диска имеют только центростремительное ускорение , направленное к центру диска. Так как система координат движется без ускорения (с постоянной скоростью υ п), то в неподвижной системе координат ускорения точек диска будут теми же.
Перейдем теперь к задачам на динамику вращательного движения. Вначале рассмотрим простейший случай, когда движение по окружности происходит с постоянной скоростью. Так как ускорение тела при этом направлено к центру, то и векторная сумма всех сил, приложенных к телу, должна быть тоже направлена к центру, и по II закону Ньютона .
Следует помнить, что в правую часть этого уравнения входят только реальные силы, действующие на данное тело со стороны других тел. Никакой центростремительной силы при движении по окружности не возникает. Этим термином пользуются просто для обозначения равнодействующей сил, приложенных к телу, движущемуся по окружности. Что касается центробежной силы , то она возникает только при описании движения по окружности в неинерциальной (вращающейся) системе координат. Мы пользоваться здесь понятием центростремительной и центробежной силы вообще не будем.
Задача 4 . Определить наименьший радиус закругления дороги, которое автомобиль может пройти при скорости υ = 70 км/ч и коэффициенте трения шин о дорогу k =0,3.
Р = m·g , сила реакции дороги N и сила трения F тp между шинами автомобиля и дорогой. Силы Р и N направлены вертикально и равны по величине: P = N . Сила трения, препятствующая проскальзыванию («заносу») автомобиля, направлена к центру поворота и сообщает центростремительное ускорение: . Максимальное значение силы трения F тр max = k ·N = k ·m·g , поэтому минимальное значение радиуса окружности, по которой еще возможно движение со скоростью υ, определяется из уравнения . Отсюда (м).
Сила реакции дороги N при движении автомобиля по окружности не проходит через центр тяжести автомобиля. Это связано с тем, что ее момент относительно центра тяжести должен компенсировать момент силы трения, стремящийся опрокинуть автомобиль. Величина силы трения тем больше, чем больше скорость автомобиля . При некотором значении скорости момент силы трения превысит момент силы реакции и автомобиль опрокинется.
Задача 5 . При какой скорости автомобиль, движущийся по дуге окружности радиуса R = 130 м, может опрокинуться? Центр тяжести автомобиля находится на высоте h = 1 м над дорогой, ширина следа автомобиля l = 1,5 м (рис. 4).

В момент опрокидывания автомобиля как сила реакции дороги N , так и сила трения F тp приложены к «внешнему» колесу. При движении автомобиля по окружности со скоростью υ на него действует сила трения . Эта сила создает момент относительно центра тяжести автомобиля . Максимальный момент силы реакции дороги N = m·g относительно центра тяжести равен (в момент опрокидывания сила реакции проходит через внешнее колесо). Приравнивая эти моменты, найдем уравнение для максимальной скорости, при которой автомобиль еще не опрокинется:
![]()
Откуда ≈ 30 м/с ≈ 110 км/ч.
Чтобы автомобиль мог двигаться с такой скоростью, необходим коэффициент трения (см. предыдущую задачу).
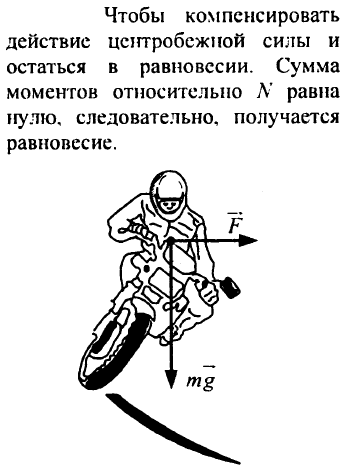
Аналогичная ситуация возникает при повороте мотоцикла или велосипеда. Сила трения, создающая центростремительное ускорение, имеет момент относительно центра тяжести, стремящийся опрокинуть мотоцикл. Поэтому для компенсации этого момента моментом силы реакции дороги мотоциклист наклоняется в сторону поворота (рис. 5).
Задача 6 . Мотоциклист едет по горизонтальной дороге со скоростью υ = 70 км/ч, делая поворот радиусом R = 100 м. На какой угол α к горизонту он должен при этом наклониться, чтобы не упасть?
Сила трения между мотоциклом и дорогой , так как она сообщает мотоциклисту центростремительное ускорение. Сила реакции дороги N = m·g . Условие равенства моментов силы трения и силы реакции относительно центра тяжести дает уравнение: F тp ·l ·sin α = N ·l ·cos α, где l - расстояние ОА от центра тяжести до следа мотоцикла (см. рис. 5).

Подставляя сюда значения F
тp и N
, находим что или ![]() . Отметим, что равнодействующая сил N
и F
тp при этом угле наклона мотоцикла проходит через центр тяжести, что и обеспечивает равенство нулю суммарного момента сил N
и F
тp .
. Отметим, что равнодействующая сил N
и F
тp при этом угле наклона мотоцикла проходит через центр тяжести, что и обеспечивает равенство нулю суммарного момента сил N
и F
тp .
Для того, чтобы увеличить скорость движения по закруглению дороги, участок дороги на повороте делают наклонным. При этом в создании центростремительного ускорения, кроме силы трения, участвует и сила реакции дороги.
Задача 7 . С какой максимальной скоростью υ может двигаться автомобиль по наклонному треку с углом наклона α при радиусе закругления R и коэффициенте трения шин о дорогу k ?
На автомобиль действуют сила тяжести m·g , сила реакции N , направленная перпендикулярно плоскости трека, и сила трения F тp , направленная вдоль трека (рис. 6).

Так как нас не интересуют в данном случае моменты сил, действующих на автомобиль, мы нарисовали все силы приложенными к центру тяжести автомобиля. Векторная сумма всех сил должна быть направлена к центру окружности, по которой движется автомобиль, и сообщать ему центростремительное ускорение. Поэтому сумма проекций сил на направление к центру (горизонтальное направление) равна , то есть
![]()
Сумма проекций всех сил на вертикальное направление равна нулю:
N ·cos α – m·g – F т p ·sin α = 0.
Подставляя в эти уравнения максимальное возможное значение силы трения F
тp = k·N
и исключая силу N
, находим максимальную скорость ![]() , с которой еще возможно движение по такому треку. Это выражение всегда больше значения , соответствующего горизонтальной дороге.
, с которой еще возможно движение по такому треку. Это выражение всегда больше значения , соответствующего горизонтальной дороге.
Разобравшись с динамикой поворота, перейдем к задачам на вращательное движение в вертикальной плоскости.
Задача 8 . Автомобиль массы m = 1,5 т движется со скоростью υ = 70 км/ч по дороге, показанной на рисунке 7. Участки дороги АВ и ВС можно считать дугами окружностей радиуса R = 200 м, касающимися друг друга в точке В . Определить силу давления автомобиля на дорогу в точках А и С . Как меняется сила давления при прохождении автомобилем точки В ?

В точке А
на автомобиль действуют сила тяжести Р
= m·g
и сила реакции дороги N A
. Векторная сумма этих сил должна быть направлена к центру окружности, то есть вертикально вниз, и создавать центростремительное ускорение: , откуда ![]() (Н). Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе реакции. В точке С
векторная сумма сил направлена вертикально вверх: и
(Н). Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе реакции. В точке С
векторная сумма сил направлена вертикально вверх: и ![]() (Н). Таким образом, в точке А
сила давления меньше силы тяжести, а в точке С
- больше.
(Н). Таким образом, в точке А
сила давления меньше силы тяжести, а в точке С
- больше.
В точке В
автомобиль переходит с выпуклого участка дороги на вогнутый (или наоборот). При движении по выпуклому участку проекция силы тяжести на направление к центру должна превышать силу реакции дороги N B
1 , причем ![]() . При движении по вогнутому участку дороги, наоборот, сила реакции дороги N В
2 превосходит проекцию силы тяжести:
. При движении по вогнутому участку дороги, наоборот, сила реакции дороги N В
2 превосходит проекцию силы тяжести: ![]() .
.
Из этих уравнений получаем, что при прохождении точки В сила давления автомобиля на дорогу меняется скачком на величину ≈ 6·10 3 Н. Разумеется, такие ударные нагрузки действуют разрушающе как на автомобиль, так и на дорогу. Поэтому дороги и мосты всегда стараются делать так, чтобы их кривизна менялась плавно.
При движении автомобиля по окружности с постоянной скоростью сумма проекций всех сил на направление, касательное к окружности, должна быть равна нулю. В нашем случае касательная составляющая силы тяжести уравновешивается силой трения между колесами автомобиля и дорогой.
Величина силы трения регулируется вращательным моментом, прикладываемым к колесам со стороны мотора. Этот момент стремится вызвать проскальзывание колес относительно дороги. Поэтому возникает сила трения, препятствующая проскальзыванию и пропорциональная приложенному моменту. Максимальное значение силы трения равно k·N , где k - коэффициент трения между шинами автомобиля и дорогой, N - сила давления на дорогу. При движении автомобиля вниз сила трения играет роль тормозящей силы, а при движении вверх, наоборот, роль силы тяги.
Задача 9 . Автомобиль массой m = 0,5 т, движущийся со скоростью υ = 200 км/ч, совершает «мертвую петлю» радиуса R = 100 м (рис. 8). Определить силу давления автомобиля на дорогу в верхней точке петли А ; в точке В , радиус-вектор которой составляет угол α = 30º с вертикалью; в точке С , в которой скорость автомобиля направлена вертикально. Возможно ли движение автомобиля по петле с такой постоянной скоростью при коэффициенте трения шин о дорогу k = 0,5?

В верхней точке петли сила тяжести и сила реакции дороги N A
направлены вертикально вниз. Сумма этих сил создает центростремительное ускорение: ![]() . Поэтому
. Поэтому ![]() Н.
Н.
Сила давления автомобиля на дорогу равна по величине и противоположна по направлению силе N А .
В точке В
центростремительное ускорение создается суммой силы реакции и проекции силы тяжести на направление к центру: ![]() . Отсюда
. Отсюда ![]() Н.
Н.
Легко видеть, что N B > N A ; с увеличением угла α сила реакции дороги увеличивается.
В точке С
сила реакции ![]() Н; центростремительное ускорение в этой точке создается только силой реакции, а сила тяжести направлена по касательной. При движении по нижней части петли сила реакции будет превышать и максимальное значение
Н; центростремительное ускорение в этой точке создается только силой реакции, а сила тяжести направлена по касательной. При движении по нижней части петли сила реакции будет превышать и максимальное значение ![]() Н сила реакции имеет в точке D
. Значение
Н сила реакции имеет в точке D
. Значение ![]() , таким образом, является минимальным значением силы реакции.
, таким образом, является минимальным значением силы реакции.
Скорость автомобиля будет постоянной, если касательная составляющая силы тяжести не превышает максимальной силы трения k·N
во всех точках петли. Это условие заведомо выполняется, если минимальное значение ![]() превосходит максимальное значение касательной составляющей силы веса. В нашем случае это максимальное значение равно m·g
(оно достигается в точке С
), и условие выполняется при k
= 0,5, υ = 200 км/ч, R
= 100 м.
превосходит максимальное значение касательной составляющей силы веса. В нашем случае это максимальное значение равно m·g
(оно достигается в точке С
), и условие выполняется при k
= 0,5, υ = 200 км/ч, R
= 100 м.
Таким образом, в нашем случае движение автомобиля по «мертвой петле» с постоянной скоростью возможно.
Рассмотрим теперь движение автомобиля по «мертвой петле» с выключенным мотором. Как уже отмечалось, обычно момент силы трения противодействует моменту, приложенному к колесам со стороны мотора. При движении автомобиля с выключенным мотором этого момента нет, и силой трения между колесами автомобиля и дорогой можно пренебречь.
Скорость автомобиля уже не будет постоянной - касательная составляющая силы тяжести замедляет или ускоряет движение автомобиля по «мертвой петле». Центростремительное ускорение тоже будет меняться. Создается оно, как обычно, равнодействующей силы реакции дороги и проекции силы тяжести на направление к центру петли.
Задача 10 . Какую наименьшую скорость должен иметь автомобиль в нижней точке петли D (см. рис. 8) для того, чтобы совершить ее с выключенным мотором? Чему будет равна при этом сила давления автомобиля на дорогу в точке В ? Радиус петли R = 100 м, масса автомобиля m = 0,5 т.
Посмотрим, какую минимальную скорость может иметь автомобиль в верхней точке петли А , чтобы продолжать двигаться по окружности?
Центростремительное ускорение в этой точке дороги создается суммой силы тяжести и силы реакции дороги ![]() . Чем меньшую скорость имеет автомобиль, тем меньшая возникает сила реакции N A
. При значении эта сила обращается в нуль. При меньшей скорости сила тяжести превысит значение, необходимое для создания центростремительного ускорения, и автомобиль оторвется от дороги. При скорости сила реакции дороги обращается в нуль только в верхней точке петли. В самом деле, скорость автомобиля на других участках петли будет большей, и как легко видеть из решения предыдущей задачи, сила реакции дороги тоже будет большей, чем в точке А
. Поэтому, если автомобиль в верхней точке петли имеет скорость , то он нигде не оторвется от петли.
. Чем меньшую скорость имеет автомобиль, тем меньшая возникает сила реакции N A
. При значении эта сила обращается в нуль. При меньшей скорости сила тяжести превысит значение, необходимое для создания центростремительного ускорения, и автомобиль оторвется от дороги. При скорости сила реакции дороги обращается в нуль только в верхней точке петли. В самом деле, скорость автомобиля на других участках петли будет большей, и как легко видеть из решения предыдущей задачи, сила реакции дороги тоже будет большей, чем в точке А
. Поэтому, если автомобиль в верхней точке петли имеет скорость , то он нигде не оторвется от петли.
Теперь определим, какую скорость должен иметь автомобиль в нижней точке петли D , чтобы в верхней точке петли А его скорость . Для нахождения скорости υ D можно воспользоваться законом сохранения энергии, как если бы автомобиль двигался только под действием силы тяжести. Дело в том, что сила реакции дороги в каждый момент направлена перпендикулярно перемещению автомобиля, а, следовательно, ее работа равна нулю (напомним, что работа ΔA = F ·Δs ·cos α, где α - угол между силой F и направлением перемещения Δs ). Силой трения между колесами автомобиля и дорогой при движении с выключенным мотором можно пренебречь. Поэтому сумма потенциальной и кинетической энергии автомобиля при движении с выключенным мотором не меняется.
Приравняем значения энергии автомобиля в точках А и D . При этом будем отсчитывать высоту от уровня точки D , то есть потенциальную энергию автомобиля в этой точке будем считать равной нулю. Тогда получаем
![]()
Подставляя сюда значение для искомой скорости υ D , находим: ≈ 70 м/с ≈ 260 км/ч.
Если автомобиль въедет в петлю с такой скоростью, то он сможет совершить ее с выключенным мотором.
Определим теперь, с какой силой при этом автомобиль будет давить на дорогу в точке В . Скорость автомобиля в точке В опять легко находится из закона сохранения энергии:
Подставляя сюда значение , находим, что скорость ![]() .
.
Воспользовавшись решением предыдущей задачи, по заданной скорости находим силу давления в точке B :
Аналогично можно найти силу давления в любой другой точке «мертвой петли».
Упражнения
1. Найти угловую скорость искусственного спутника Земли, вращающегося по круговой орбите с периодом обращения Т = 88 мин. Найти линейную скорость движения этого спутника, если известно, что его орбита расположена на расстоянии R = 200 км от поверхности Земли.
2. Диск радиуса R помещен между двумя параллельными рейками. Рейки движутся со скоростями υ 1 и υ 2 . Определить угловую скорость вращения диска и скорость его центра. Проскальзывание отсутствует.
3. Диск катится по горизонтальной поверхности без проскальзывания. Показать, что концы векторов скоростей точек вертикального диаметра находятся на одной прямой.
4. Самолет движется по окружности с постоянной горизонтальной скоростью υ = 700 км/час. Определить радиус R этой окружности, если корпус самолета наклонен на угол α = 5°.
5. Груз массы m = 100 г, подвешенный на нити длины l = 1 м, равномерно вращается по кругу в горизонтальной плоскости. Найти период обращения груза, если при его вращении нить отклонена по вертикали на угол α = 30°. Определить также натяжение нити.
6. Автомобиль движется со скоростью υ = 80 км/ч по внутренней поверхности вертикального цилиндра радиуса R = 10 м по горизонтальному кругу. При каком минимальном коэффициенте трения между шинами автомобиля и поверхностью цилиндра это возможно?
7. Груз массой m подвешен на нерастяжимой нити, максимально возможное натяжение которой равно 1,5m·g . На какой максимальный угол α можно отклонить нить от вертикали, чтобы при дальнейшем движении груза нить не оборвалась? Чему будет равно при этом натяжение нити в тот момент, когда нить составит угол α/2 с вертикалью?
Ответы
I. Угловая скорость искусственного спутника Земли ≈ 0,071 рад/с. Линейная скорость спутника υ = ω·R . где R - радиус орбиты. Подставляя сюда R = R 3 + h , где R 3 ≈ 6400 км, находим υ ≈ 467 км/с.
2. Здесь возможны два случая (рис. 1). Если угловая скорость диска ω, а скорость его центра υ, то скорости точек, соприкасающихся с рейками, будут соответственно равны
в случае a) υ 1 = υ + ω·R , υ 2 = υ – ω·R ;
в случае б) υ 1 = υ + ω·R , υ 2 = ω·R – υ.
(Мы приняли для определенности, что υ 1 > υ 2). Решая эти системы, находим:
а)![]()
б) ![]()

3. Скорость любой точки М , лежащей на отрезке ОВ (см. рис. 2), находится по формуле υ M = υ + ω·r M , где r M - расстояние от точки М до центра диска О . Для любой точки N , принадлежащей отрезку ОА , имеем: υ N = υ – ω·r N , где r N - расстояние от точки N до центра. Обозначим через ρ расстояние от любой точки диаметра ВА до точки А соприкосновения диска с плоскостью. Тогда очевидно, что r M = ρ – R и r N = R – ρ = –(ρ – R ). где R - радиус диска. Поэтому скорость любой точки на диаметре ВА находится по формуле: υ ρ = υ + ω·(ρ – R ). Так как диск катится без проскальзывания, то и для скорости υ ρ получаем υ ρ = ω·ρ. Отсюда следует, что концы векторов скоростей находятся на прямой, выходящей из точки А и наклоненной к диаметру ВА под углом, пропорциональным угловой скорости вращения диска ω.

Доказанное утверждение позволяет нам сделать вывод, что сложное движение точек, находящихся на диаметре ВА , можно в каждый данный момент рассматривать как простое вращение вокруг неподвижной точки А с угловой скоростью ω, равной угловой скорости вращения вокруг центра диска. В самом деле, в каждый момент скорости этих точек направлены перпендикулярно диаметру ВА , а по величине равны произведению ω на расстояние до точки А .
Оказывается, что это утверждение справедливо для любой точки диска. Более того, оно является общим правилом. При любом движении твердого тела в каждый момент существует ось, вокруг которой тело просто вращается - мгновенная ось вращения.
4. На самолет действуют (см. рис. 3) сила тяжести Р = m·g и подъемная сила N , направленная перпендикулярно плоскости крыльев (так как самолет движется с постоянной скоростью, то сила тяги и сила лобового сопротивления воздуха уравновешивают друг друга). Равнодействующая сил Р

6. На автомобиль действуют (рис. 5) сила тяжести Р
= m·g
, сила реакции со стороны цилиндра N
и сила трения F
тp . Так как автомобиль движется по горизонтальному кругу, то силы Р
и F
тp уравновешивают друг друга, а сила N
создает центростремительное ускорение . Максимальное значение силы трения связано с силой реакции N
соотношением: F
тp = k·N
. В результате получаем систему уравнений: ![]() , из которой находится минимальное значение коэффициента трения
, из которой находится минимальное значение коэффициента трения

7. Груз будет двигаться по окружности радиуса l
(рис. 6). Центростремительное ускорение груза (υ - скорость груза) создается разностью величин силы натяжения нити Т
и проекции силы тяжести m·g
направление нити: ![]() . Поэтому
. Поэтому ![]() , где β - угол, образуемый нитью с вертикалью. По мере того, как груз будет опускаться, его скорость будет расти, а угол β будет уменьшаться. Натяжение нити станет максимальным при угле β = 0 (в тот момент, когда нить будет вертикальной):
, где β - угол, образуемый нитью с вертикалью. По мере того, как груз будет опускаться, его скорость будет расти, а угол β будет уменьшаться. Натяжение нити станет максимальным при угле β = 0 (в тот момент, когда нить будет вертикальной): ![]() . Максимальная скорость груза υ 0 находится по углу α, на который отклоняют нить, из закона сохранения энергии:
. Максимальная скорость груза υ 0 находится по углу α, на который отклоняют нить, из закона сохранения энергии:
![]()
Используя это соотношение, для максимального значения натяжения нити получаем формулу: T m ax = m·g ·(3 – 2 cos α). По условию задачи T m ах = 2m·g . Приравнивая эти выражения, находим cos α = 0,5 и, следовательно, α = 60°.
Определим теперь натяжение нити при . Скорость груза в этот момент также находится из закона сохранения энергии:
![]()
Подставляя значение υ 1 в формулу для силы натяжения, находим:

1624. Что означает выражение «машину занесло на повороте»? Почему это происходит?
1625. Почему при быстрой езде по кругу мотоциклист сильно наклоняется к центру круга?
1626. При повороте в воздухе самолет опускает вниз то крыло, в какую сторону поворачивает. Корабль при повороте в воде опускает вниз борт, противоположный стороне поворота. Почему?

1627. Почему наездники в цирке свободно держатся на том боку седла, который обращен к центру арены, а на противоположном боку седла им удержаться гораздо труднее?
1628. При вращении шарика на резинке, резинка растягивается, причем тем сильнее, чем быстрее вращается шарик. Почему резинка растягивается?

1629. Велосипедист, двигаясь на большой скорости, может преодолеть чертово колесо (рис. 220). Почему велосипедист не падает в верхней точке петли?

1630. Кубик массой 0,4 кг положили на грампластинку на расстоянии 0,2 м от ее центра (рис. 221). При вращении пластинки линейная скорость кубика равна 0,2 м/с. Каково ускорение кубика? Какая сила удерживает кубик на пластинке и чему она равна?

1631. Мотоцикл проходит поворот радиусом 20 м. Коэффициент трения между колесами и землей равен 0,7. С какой наибольшей скоростью может двигаться мотоцикл, чтобы не возникло заноса?

1632. Во время дождя коэффициент трения между колесами мотоцикла и землей уменьшается до 0,1. Решите предыдущую задачу для дождливой погоды. Во сколько раз найденная вами скорость мотоцикла из предыдущей задачи будет меньше во время дождя?

1633. Определите центростремительную силу, действующую на вагон метро массой 16 т, когда он движется со скоростью 8 м/с по закруглению радиусом 80 м.

1634. Постройте траекторию движения тела, брошенного горизонтально со скоростью 30 м/сек с высоты 80 м. Определите, на каком расстоянии от места бросания тело упадет на землю и скорость его в момент удара о землю. Сопротивление воздуха не учитывать. Принять g = 10 м/сек2.

1635. С мачты парохода с высоты 10 м над палубой уронили мяч. Скорость парохода 18 км/час. На сколько успеет переместиться пароход за время падения мяча? Где упадет мяч? Какова траектория движения мяча по отношению к поверхности моря? Какова скорость мяча в момент удара о палубу?

1636. На краю стола лежит кусочек мела. Мелу сообщили горизонтальный толчок по направлению, перпендикулярному к классной доске. След от удара мела о доску лежит на 20 см ниже поверхности стола. Расстояние доски от края стола 1 м. Определите начальную скорость мела.

1637. С какой скоростью надо бросить тело в горизонтальном направлении с высоты 20 м, чтобы скорость его в момент падения на землю была 25 м/сек?
(Указание. Решите эту задачу на основании закона сохранения энергии.)

1638. Грузовик массой 5000 кг движется со скоростью 28,8 км/ч по выпуклому мосту с радиусом кривизны 0,04 км. С какой силой давит грузовик на середину моста? С какой скоростью он должен ехать, чтобы не оказывать давления на верхнюю точку моста?

1639. Тепловоз массой 15 т движется по вогнутому мосту с радиусом кривизны 0,05 км. Сила давления тепловоза на середину моста равна 149,5 кН. Какова скорость тепловоза?

1640. Автофургон идет по закруглению радиусом 200 м со скоростью 72 км/ч. При этом внутри фургона производится взвешивание на пружинных весах груза массой 49 кг. Определите показания пружинных весов.

1641. Самолет делает «мертвую петлю» радиусом 0,245 км в вертикальной плоскости. При какой наименьшей скорости самолета в верхней части петли летчик не будет отрываться от кресла?

1642. Самолет, летящий со скоростью 360 км/ч, описывает в вертикальной плоскости «петлю Нестерова» радиусом 0,2 км. Во сколько раз сила, прижимающая летчика к сиденью в нижней точке петли, больше его веса?

1643. Самолет, летящий со скоростью 540 км/ч, описывает в вертикальной плоскости «мертвую петлю» радиусом 500 м. Во сколько раз сила, прижимающая летчика к сиденью, в нижней точке петли больше силы, прижимающей летчика к сиденью, в верхней точке петли?

1644. Коленчатый вал двигателя делает 3600 об/мин. Найдите угловую скорость и период вращения коленчатого вала.

1645. Винт вертолета вращается с частотой 1500 об/мин. Скорость полета вертолета 72 км/ч. Сколько оборотов сделает винт на пути 120 км?

1646. Определите угол поворота Земли вокруг собственной оси за 120 мин.

1647. Коленчатый вал радиусом 2 см делает два оборота за ОД с. Какова частота вращения вала? Найдите угловую и линейную скорости точек поверхности вала.

1648. Самолет летит на широте Санкт-Петербурга (60°). Его пассажиры и экипаж видят, что за окнами иллюминаторов все время светло, ночь не наступает. В каком направлении и с какой скоростью летит самолет? (Радиус Земли 6400 км.)

1649. Вал радиусом 10 см с прикрепленной к нему нитью начал равномерно вращаться. Через 5 с на него намоталось 15 м нити. Найти период, частоту и угловую скорость вращения вала.

1650. Диаметр точильного камня равен 0,3 м. Линейная скорость точек на его рабочей поверхности равна 10 м/с. Определите угловую скорость, частоту и период вращения точильного камня. Сколько оборотов он сделает за 1,5 мин? На какой угол он повернется за это же время?

1651. Шкив радиусом 50 см делает 110 об/мин. Определите период вращения и линейную скорость точек, лежащих на окружности шкива. Какой путь пройдет одна из этих точек за 2 мин?

1652. Капля краски на ободе колеса, имеющего диаметр 20 см движется с линейной скоростью 628 см/с. Сколько оборотов шкив делает за минуту?

1653. Для качественной шлифовки поверхность наждачного круга не должна иметь линейную скорость более 50 м/с. На шлифовальной машине такой круг диаметром в 200 мм делает 3000 оборотов в минуту. Допустима ли такая скорость?

1654. Шлифовальный круг радиусом 30 см равномерно вращается вокруг оси в его центре О (рис. 222). Линейная скорость точки А на круге равна 3,5 м/с. Определите линейную скорость точки Б, расположенной на расстоянии 5 см от оси вращения.

1655. Укажите направление ускорения движущегося тела в положениях А и В, показанных на рисунке 223.

1656. На рисунке 224 показана рука, вращающая камень, привязанный к веревке. Укажите, какие силы действуют на камень, на веревку, на руку, и изобразите их векторами. Если в положении, показанном на рисунке, веревка оборвется, то как будет двигаться камень?

1657. На прибор, состоящий из стержня, по которому могут скользить два шарика: масса одного в 2 раза больше массы другого. Оба шарика связаны нитью так, что центры тяжести их расположены друг от друга на расстоянии 12 см. Весь прибор приводится во вращение вокруг вертикальной оси. Рассчитайте, на каком расстоянии от оси вращения должны быть расположены шарики, чтобы при вращении прибора они оставались на месте, не скользили по стержню.

1658. Если на веревке привязать маленькое ведерко с водой, то можно это ведерко вращать по кругу и вода из него не выльется. Изготовьте ведерко из жестяной банки и проделайте такой опыт. Постарайтесь объяснить его.

1659. Радиус окружности, по которой движется конец секундной стрелки, 0,8 см, минутной - 2 см, часовой - 1,5 см. Найдите линейные и угловые скорости стрелок.

1660. Ведущее колесо паровоза диаметром 1,6 м делает 120 оборотов в минуту. С какой скоростью движется паровоз?

1661. Найдите линейную и угловую скорости точки земной поверхности на широте Москвы при суточном вращении Земли вокруг оси. Считать радиус Земли равным 6400 км.

1662. Во сколько раз линейная скорость конца минутной стрелки больше линейной скорости конца часовой стрелки, если минутная стрелка в 1,2 раза длиннее часовой?

1663. Колесо катится без проскальзывания со скоростью 5 м/с. Найдите скорости точек А, В, С, D, Е (рис. 226) относительно Земли. Расстояние от точки Е до центра колеса равно половине радиуса.

1667. Масса планеты Марс составляет 0,11 массы Земли. Во сколько раз первая космическая скорость для Марса меньше, чем для Земли, если его радиус равен 0,53 радиуса Земли?

1668. Космический корабль удалился от поверхности Земли на расстояние, равное радиусу Земли. Какую скорость он должен развить, чтобы вращаться по окружности вокруг Земли?

1669. Искусственный спутник Земли движется по круговой орбите вокруг Земли на высоте, равной 4000 км над поверхностью Земли. Найдите его скорость и период обращения.
1672. Искусственный спутник движется в плоскости земного экватора и с Земли кажется неподвижным. Какова скорость спутника? Найдите расстояние от спутника до центра Земли.

Задача по физике - 3505
2017-05-27
Мотоциклист движется по горизонтальной плоскости, описывая окружность радиуса $R = 90 м$ (рис.); коэффициент трения колес о почву $k = 0,4$. На какой угол d от вертикали должен отклониться мотоциклист при скорости $v_{1} = 15 м/с$? С какой максимальной скоростью может он ехать по заданной окружности?

Решение:
Будем рассматривать мотоциклиста и мотоцикл как единое твердое тело. На мотоциклиста при его движении действуют: сила тяжести; сила нормальной реакции; сила тяги двигателя; сила трения, направленная по касательной к траектории; сила трения, направленная к центру окружности. Поскольку при движении по окружности радиального перемещения у мотоциклиста нет, последняя сила - сила трения покоя.
Если мотоциклист движется с постоянной скоростью, то сила тяги двигателя и сила трения, направленные по касательной к траектории, взаимно компенсируют друг друга. Сила тяжести приложена к центру масс, сила нормальной реакции и радиальная сила трения покоя $\vec{f}_{тр}$ приложены к нижней точке каждого из колес и создают вращающий момент относительно воображаемой горизонтальной оси, проходящей через центр масс мотоциклиста. Ось эта вместе с центром масс движется относительно Земли по криволинейной траектории (окружности) и обладает нормальным ускорением. Следовательно, система отсчета, связанная с центром масс мотоциклиста, неинерциальна, и в ней на мотоциклиста, помимо всех перечисленных сил, действует еще центробежная сила инерции
$\vec{F}_{цб} = \sum \vec{F}_{цбi} = - \sum m_{i} \vec{a}_{ni} = \sum m_{i} \omega^{2} \vec{r}_{i}$,
где $m_{i}$ - масса каждой материальной точки; $\vec{a}_{ni}$ - ее нормальное ускорение, направленное к центру окружности; $\vec{r}_{i}$ - ее радиус-вектор, проведенный из центра окружности.
Размеры мотоциклиста малы по сравнению с радиусом его траектории, поэтому можно считать, что радиусы, описываемые каждой материальной точкой окружности, одинаковы, т. е. $r_{i} = R$, следовательно, одинаковы и линейные скорости всех точек. Тогда
$v_{i} = \omega R, F_{цб} = m \omega^{2} R$.
В этом случае центробежная сила инерции приложена в центре масс (как и сила тяжести) и не создает вращающего момента относительно рассматриваемой оси. Условие равновесия мотоциклиста сводится к тому, что сумма моментов сил трения $\vec{f}_{тр}$ и нормальной реакции $\vec{N}$ относительно горизонтальной оси, проходящей через центр масс, равна нулю:
$\vec{M}_{тр} + \vec{M}_{N} = 0$. (1)
Если размеры мотоциклиста сравнимы с радиусом $R$, то центробежные силы инерции, действующие на отдельные точки мотоциклиста, тем больше, чем больше радиус г, описываемой окружности. В этом случае точка приложения результирующей $\vec{F}_{цб}$ будет расположена ниже центра масс и вращающий момент относительно рассматриваемой оси окажется отличным от нуля. Тогда условие равновесия (1) несправедливо.
Уравнение (1) позволит найти угол $\alpha$ отклонения мотоциклиста от вертикали, так как моменты обеих сил [см. (1)] зависят от этого угла.
В рассматриваемой неинерциальной системе мотоциклист неподвижен. Следовательно, сумма всех сил, действующих на мотоциклиста, равна нулю:
$m \vec{g} + \vec{F}_{цб} + \vec{f}_{тр} + \vec{N} = 0$. (2)
Поскольку центробежная сила инерции зависит от угловой скорости движения, уравнение (2) позволит найти ее возможные значения.
Моменты сил трения и нормальной реакции будут скомпенсированы, т. е. равенство (1) выполняется, если результирующая этих сил проходит через центр масс, т. е. если
$rg \alpha = f_{тр}/N$. (3)
Равенство (2), записанное для проекций на оси: горизонтальной, направленной к центру описываемой окружности, и вертикальной, - примет вид
$f_{тр} - F_{цб} = 0$, (4)
$N - mg = 0$. (5)
Из равенства (4) найдем
$f_{тр} = m \omega^{2}R = mv^{2}/R$. (6)
Подставим выражения (5) и (6) в (3), учитывая, что $v = v_{1}$:
$tg \alpha = v_{1}^{2}/ (gR) = 0,255; \alpha = 14^{ \circ}$.
Как уже отмечалось, $f_{тр}$ есть сила трения покоя, следовательно, $f_{тр} \leq kN = kmg$ и равенство (4) можно записать в виде
$F_{цб} = f_{тр} \leq kmg$ или $mv^{2}/R \leq kmg$.
Окончательно
$v_{max} = \sqrt{kgR} = 19 м/с$.
союз советскихсаэащишпаиРЕСПУБЛИК госуддрств-:ннцй компо дк пдм изот:ткн ет сси открыт ПИСАНИЕ ИЗОБРЕТЕНИ и тво СССР 1977.(54) УСТРОЙСТВО ДЛЯ ОПР МЕТРОВ ЭКСПОНЕНЦИАЛЬНО КОРРЕЛЯЦИОННОЙ ФУНКЦИИ (57) Изобретение относ вычислительной техники использовано при иссле чайных процессов в зад ДЕЛЕНИЯ ПАРОСИНУСНОЙ ся к облас может быт ванин слуах автомат С:.80;,3 дшш 4 006 6 ческого управления, идентификациии т,д. Цель изобретения - расширениефункциональных возможностей за счетопределения последовательности некоррелированных дискретных значений исследуемого случайного процесса. Цельдостигается введением в известное устройство генератора синхроимпульсов,аналого-цифрового и цифроаналоговогопреобразователей, первого и второгоключей, счетчика и блока сравнения,Новые блоки и соответствующие функциональные связи позволяют определить некоррелированные дискретныезначения исследуемого процесса, т.е.синтезировать последовательность некоррелированных случайных величин,1 ил, 4 Изобретение относится к области вычислительной техники и может бытьиспользовано при исследовании слу-.чайных процессов в задачах автоматического управления идентификациии т.д,Цель изобретения - расширениефункциональных вазможностей за счетопределения последовательности некоррелированных дискретных значенийисследуемого случайного процесса,На чертеже представлена структур ная схема устройства,Устройство содержит усилительограничитель 1, блок 2 среднего числа пересечений, блок 3 экспоненциального сглаживания, оцноканальныйкоррелятор 4, вычислительный блок 5блок б возведения в степень, блок 7умножения, блок 8 деления, блок 9сравнения, цифроаналоговый преобра-.зователь 10, счетчик 11, первыйкл 1 оч 12, аналого-цифровой преобразователь 13, второй ключ 14, генератор 15 синхроимпульсав, выход 1 б некоррелированного значения случайного процесса.Устройство работает следующим Образом,Усилитель-ограничитель 1 преобразует исследуемьп случайный процесс в знаковый сигнал, В блоке 2 среднего числа пересечений измеряется среднее число пересечений нулевого уровня которое с точнастно до коэффициента пропорциональности совпадает с параметром ь затухания: экспоненци ально-косинусной корреляционной функ" ции (ЭККФ), аппроксимирующей знако вую корреляционную функцию исследуемого случайного процесса. Знаковый сигнал подвергается экспоненциапьному сглаживанию в блоке. 3, а коррелятор 4 определяет корреляционный момент сигналов на выходе блока 3 экспоненциального сглаживания, Известначто вьгхаднаи сиг нал ко 1)релятора р включенного таким образом, пропорционален первому коэффициенту разложения корреляционной функции в ряд Лагерра от аргументас, гдепараметр затухания экспоненциального сглаживающего фильтра. В вычислительном блохе 5 по сигналу с блока 2 и коррелятора 4 оценивается коэффициент, определяющий частоту колебательнасти корреляционной функции по формуле:Нараме:р " поступает с выхода вычислительного блока 5 на вход бло - г:а б возведения в степень, где осуон шести,еяется вычисление величины /пугем возведения 9 в степень 0,05. Отот сигнал подается на первый вход блока 1 умножения, на второй вход которого поступает оценка параметра Ф с выхода блока 2 среднего числа пересечений. В блоке 7 умножения выО,1числя е тс я з нач сние М, к о то ро е по цае тс я на вход блока 8 деления, где ос ущсс тпл я е тс я деление по с то яннай в еличины, равной 0 , б 1 , в с о отв ета 1 сгвии с формулой с = О,б 1/К/3 . Быггислепнсе значение интервала корреляции оц ЗК 1 М поступает на первый вход блока 9 сравнения. С информационного входа устройства исследуемь.й случайный процесс через аналогоцифровой преобразователь 13 поступает на упраезляющий вход первого ключа 12, При этом аналоговое напряжение, соответствующее значениюс выхода блока 8 деления поступает на первый вход блока 9 сравнения. На второй вход блока 9 сравнения поступает с выхода цифроаналогового преобразователя 1 О аналоговое напряжение, соответствующее текущему времени случяйнага п 1 эацесса т, . При этом счет текущего" времени т., осуществляеся н счетчике 11 который осуществляет считывание периодической по следовательносги синхроимпульсов. настпа 1 опих па его счетный вход саьехода зторого ключа 14, Синхроимнульсы езырабатываются генератором 15 сннхроимпульсов и поступают на входсчет 1 пгка.только при открытом втором клоче 14. Ключ 14 открывается таль.,са при наличии на входе устраи ства исследуемого случайного процесЛри наличии на первом входе кзпо-.а 1, напряжения, соответствующего случайному процессу, он открывается и сипхроимпульсы, поступающие на его второй вход, приходят на вход счетчика 11. Так как период следования импульсе:з постоянен и известен, количество считанных импульсов даетинформацию о текущем времени случайного процесса. Выход счетчика 11 соединен с входом цифроаналогового преобразователя, с выхода которого ана20 тель Е. ЕфимоваМ.Хаданич СостРедактор С. Патрушева Техр орректар А. Тясодписное 73/52 Тираж 671 ВНИИПИ Государственного по делам изобретений и 113035, Москва, Ж, РаушсЗаказ мнтета СС открытииая наб., д. 4/5 роизводственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4 логовое напряжение, соответствующеетекущему времени, поступает на второй вход блока 9 сравнения и сравнивается с аналоговым значением,При выполнении условия= 1, сигнал с выхода равенства блока сравнения открывает первый ключ 12 и текущее некоррелированное значение случайного процесса в цифровой формепоступает на выход 16 устройства иодновременно на вход установки нулясчетчика 11 для его обнуления. Формула и з обретения5 Устройство для определения параметров экспоненциально-косинусной корреляционной Функции по авт.св.9 696487, о т л и ч а ю щ е е с я тем, что, с целью расширения функциональных возможностей за счет определения последовательности некоррелированных дискретных значений исследуемого случайного процесса, в него дополнительно введены генератор сиихроимпульсов, аналого-цифровойпреобразователь, цифроаналоговый преобразователь, первый ключ, второйключ, счетчик и блок сравнения, выход равенства которого соединен с управляющим входом первого ключа, информационный вход которого соединенс выходом аналого-цифрового преобразователя, вход которого является чнформационным входом устройства и соединен с управляющим входом второгоключа, информационный вход которогосоединен с выходом генератора синхраимпульсов, выход второго ключасоединен со счетным входом счетчика,выход которого подключен к входу цифроаналогового преобразователя, выходкоторого соединен с первым информационным входам блока сравнения, второй информационный вход которого соединен с выходом блока деления, выход первого ключа соединен с входамустановки нуля счетчика и являетсявыходом некоррелированного значенияслучайного процесса устройства.г
Заявка
3853239, 24.10.1984
ВОЕННО-ВОЗДУШНАЯ ИНЖЕНЕРНАЯ ОРДЕНА ЛЕНИНА И ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ КРАСНОЗНАМЕННАЯ АКАДЕМИЯ ИМ. ПРОФ. Н. Е. ЖУКОВСКОГО
БУРБА АЛЕКСАНДР АЛЕКСЕЕВИЧ, МОНСИК ВЛАДИСЛАВ БОРИСОВИЧ, ОПАРЫШЕВ ВАЛЕРИЙ ВЛАДИМИРОВИЧ
МПК / Метки
Код ссылки
Устройство для определения параметров экспоненциально косинусной корреляционной функции
Похожие патенты
С атмосферой, а в глухой камере установлена пружина.На фиг. 1 изображен пневматический блок сравнения; на фиг. 2 - схема блока при выполнении узла ограничения в виде дросселя; 20 на фиг. 3 - схема блока при выполнении узла ограничения в виде соединения одномембранного элемента с дросселем; на фиг. 4 - узел ограничения в виде одномембранного элемента с обратным клапаном, 25Пневматический блок сравнения (фиг. 11 содержит входной одномембранный элемент 1, камеры которого соединены с входными каналами Р, и Р, а сопло через узел 2,ограничения и дроссель 3 - с атмосферой и с глухой 30 4. Проточная камера эле ссель б соединена с источ епосредственно с выхюдньтх257874 ние Р,м, до величины давления питания. Если Рг)Р 2, то мембрана элемента 1...
Задатчика 9 расходамОНОмера, прямой к инверсный ныхОдывторого триггера 42 соедццэнь 1 соответственно с у-, ранляющимц входамиключей 35 и 36 входы которых саедкнены и являются пятым входам блокасравнения, который соединен с выходом второго регулятора 1 концентрации мономера в шцхте, а выходы ключей 35 ц 36 соэдпнены соотне 1 стненно с пернымц вхадамк третьего 39 цчетвертого 40 элементов сравнения,вторые входы которых соединены к являются шестым входам блока сравнения,который соединен с входом задатчкка22 расхода вознратного растворителя, 5 Оиннерсный выход третьего триггера 43является выходом блока сравнения цсоединен с нхадами первого 1 и второго 2 ключей ц входом второго элемента ИЛИ 28. 55Основным элементам устройстваавтоматического...
Подводимое к зджн,)у 1, поступает через схему 2 (ири наличии нд сс втором входе разрешаюцго потенциала) в линейный аналого-цифровой прсобразовд Гель 3 и непосредственно - в аналого-цифроиои квадратор 11, При каждом запуск, производимом Выходным иъ 1 пуль(Ом схсм 1 Я ср 113 нсни 51, преобразователь 3 прсоб)разуе Напряжение в пропорциондлы)ос число и 1 пу 1013 (кОэфициент пронорципальности К). д нд выходе квадратора 11 появляются и)янульсы, ч ло КОТОРЫХ ПРОПОРЦИОНЯЛЩО КБДДРДТ) НсНР 5 Же 1131 я Унеслед) см 010 сл) Яйного процесс.С выхода преобразователя 3 импульсы подаются на схему 4, а с выхода квадр пора 11 - на схему 12 и могут проходить через эти схемы только тогда, когда триггер 16 н 1 ходится в единичном положении. 11 сходнос...
И корреляция
1.1. Понятие регрессии
Парной регрессией называется уравнение связи двух переменных у и х
вида y = f (x ),
где у – зависимая переменная (результативный признак); х – независимая, объясняющая переменная (признак-фактор).
Различают линейные и нелинейные регрессии.
Линейная регрессия описывается уравнением: y = a + b × x +e .
Нелинейные регрессии делятся на два класса: регрессии, нелинейные относительно включенных в анализ объясняющих переменных, но линейные по оцениваемым параметрам, и регрессии, нелинейные по оцениваемым параметрам.
Примеры регрессий, нелинейных по объясняющим переменным, но ли-
нейных по оцениваемым параметрам:
· полиномы разных степеней
· равносторонняя гипербола: ![]()
Примеры регрессий, нелинейных по оцениваемым параметрам:
· степенная ![]()
· показательная ![]()
· экспоненциальная ![]()
Наиболее часто применяются следующие модели регрессий:
– прямой ![]()
– гиперболы ![]()
– параболы
– показательной функции
– степенная функция ![]()
1.2. Построение уравнения регрессии
Постановка задачи. По имеющимся данным n наблюдений за совместным
изменением двух параметров x и y {(xi ,yi ), i=1,2,...,n} необходимо определить
аналитическую зависимость ŷ=f(x) , наилучшим образом описывающую данные наблюдений.
Построение уравнения регрессии осуществляется в два этапа (предполагает решение двух задач):
– спецификация модели (определение вида аналитической зависимости
ŷ=f(x) );
– оценка параметров выбранной модели.
1.2.1. Спецификация модели
Парная регрессия применяется, если имеется доминирующий фактор, который и используется в качестве объясняющей переменной.
Применяется три основных метода выбора вида аналитической зависимости:
– графический (на основе анализа поля корреляций);
– аналитический, т. е. исходя из теории изучаемой взаимосвязи;
– экспериментальный, т. е. путем сравнения величины остаточной дисперсии D ост или средней ошибки аппроксимации , рассчитанных для различных
моделей регрессии (метод перебора).
1.2.2. Оценка параметров модели
Для оценки параметров регрессий, линейных по этим параметрам, используется метод наименьших квадратов (МНК). МНК позволяет получить такие оценки параметров, при которых сумма квадратов отклонений фактических значений результативного признака у от теоретических значений ŷx при тех же значениях фактора x минимальна, т. е.

В случае линейной регрессии параметры а и b находятся из следующей
системы нормальных уравнений метода МНК:
 (1.1)
(1.1)
Можно воспользоваться готовыми формулами, которые вытекают из этой
 (1.2)
(1.2)
Для нелинейных уравнений регрессии, приводимых к линейным с помощью преобразования (x , y ) → (x’ , y’ ), система нормальных уравнений имеет
вид (1.1) в преобразованных переменных x’ , y’ .
Коэффициент b при факторной переменной x имеет следующую интерпретацию: он показывает, на сколько изменится в среднем величина y при изменении фактора x на 1 единицу измерения .
x’ = 1/x ; y’ = y .
Уравнения (1.1) и формулы (1.2) принимают вид

Экспоненциальная регрессия:
![]()
Линеаризующее преобразование: x’ = x ; y’ = lny .
Модифицированная экспонента
: ![]() , (0 < a
1 < 1).
, (0 < a
1 < 1).
Линеаризующее преобразование: x’ = x ; y’ = ln │y – К│.
Величина предела роста K выбирается предварительно на основе анализа
поля корреляций либо из качественных соображений. Параметр a 0 берется со
знаком «+», если y х > K и со знаком «–» в противном случае.
Степенная функция:
Линеаризующее преобразование: x’ = ln x ; y’ = ln y .
Показательная функция:
Линеаризующее преобразование: x’ = x ; y’ = lny .
https://pandia.ru/text/78/146/images/image026_7.jpg" width="459" height="64 src=">
Парабола второго порядка :
Парабола второго порядка имеет 3 параметра a 0, a 1, a 2, которые определяются из системы трех уравнений

1.3. Оценка тесноты связи
Тесноту связи изучаемых явлений оценивает линейный коэффициент
парной корреляции rxy для линейной регрессии (–1 ≤ r xy ≤ 1)
и индекс корреляции ρxy
для нелинейной регрессии ![]()
Имеет место соотношение

Долю дисперсии, объясняемую регрессией , в общей дисперсии результативного признака у характеризует коэффициент детерминации r2xy (для линейной регрессии) или индекс детерминации (для нелинейной регрессии).
Коэффициент детерминации – квадрат коэффициента или индекса корреляции.
Для оценки качества построенной модели регрессии можно использовать
показатель (коэффициент, индекс) детерминации R 2 либо среднюю ошибку аппроксимации.
Чем выше показатель детерминации или чем ниже средняя ошибка аппроксимации, тем лучше модель описывает исходные данные.
Средняя ошибка аппроксимации – среднее относительное отклонение
расчетных значений от фактических

Построенное уравнение регрессии считается удовлетворительным, если
значение не превышает 10–12 %.
1.4. Оценка значимости уравнения регрессии, его коэффициентов,
коэффициента детерминации
Оценка значимости всего уравнения регрессии в целом осуществляется с
помощью F -критерия Фишера.
F- критерий Фишера заключается в проверке гипотезы Но о статистической незначимости уравнения регрессии. Для этого выполняется сравнение
фактического F факт и критического (табличного) F табл значений F- критерия
Фишера.
F факт определяется из соотношения значений факторной и остаточной
дисперсий, рассчитанных на одну степень свободы

где n – число единиц совокупности; m – число параметров при переменных.
Для линейной регрессии m = 1 .
Для нелинейной регрессии вместо r 2 xy используется R 2.
F табл – максимально возможное значение критерия под влиянием случайных факторов при степенях свободы k1 = m , k2 = n – m – 1 (для линейной регрессии m = 1) и уровне значимости α.
Уровень значимости α – вероятность отвергнуть правильную гипотезу
при условии, что она верна. Обычно величина α принимается равной 0,05 или
Если F табл < F факт, то Н0 -гипотеза о случайной природе оцениваемых характеристик отклоняется и признается их статистическая значимость и надежность. Если F табл > F факт, то гипотеза Но не отклоняется и признается статистическая незначимость, ненадежность уравнения регрессии.
Для оценки статистической значимости коэффициентов линейной регрессии и линейного коэффициента парной корреляции применяется
t- критерий Стьюдента и рассчитываются доверительные интервалы каждого
из показателей.
Согласно t- критерию выдвигается гипотеза Н0 о случайной природе показателей, т. е. о незначимом их отличии от нуля. Далее рассчитываются фактические значения критерия t факт для оцениваемых коэффициентов регрессии и коэффициента корреляции путем сопоставления их значений с величиной стандартной ошибки

Стандартные ошибки параметров линейной регрессии и коэффициента
корреляции определяются по формулам
 Сравнивая фактическое и критическое (табличное) значения t-
статистики
Сравнивая фактическое и критическое (табличное) значения t-
статистики
t табл и t факт принимают или отвергают гипотезу Но.
t табл – максимально возможное значение критерия под влиянием случайных факторов при данной степени свободы k = n– 2 и уровне значимости α.
Связь между F- критерием Фишера (при k 1 = 1; m =1) и t- критерием Стьюдента выражается равенством
Если t табл < t факт, то Но отклоняется, т. е. a, b и не случайно отличаются
от нуля и сформировались под влиянием систематически действующего фактора х. Если t табл > t факт, то гипотеза Но не отклоняется и признается случайная природа формирования а, b или https://pandia.ru/text/78/146/images/image041_2.jpg" width="574" height="59">
F табл определяется из таблицы при степенях свободы k 1 = 1, k 2 = n –2 и при
заданном уровне значимости α. Если F табл < F факт, то признается статистическая значимость коэффициента детерминации. В формуле (1.6) величина m означает число параметров при переменных в соответствующем уравнении регрессии.
1.5. Расчет доверительных интервалов
Рассчитанные значения показателей (коэффициенты a , b , ) являются
приближенными, полученными на основе имеющихся выборочных данных.
Для оценки того, насколько точные значения показателей могут отличаться от рассчитанных, осуществляется построение доверительных интервалов.
Доверительные интервалы определяют пределы, в которых лежат точные значения определяемых показателей с заданной степенью уверенности, соответствующей заданному уровню значимости α.
Для расчета доверительных интервалов для параметров a и b уравнения линейной регрессии определяем предельную ошибку Δ для каждого показателя:
Величина t табл представляет собой табличное значение t- критерия Стьюдента под влиянием случайных факторов при степени свободы k = n –2 и заданном уровне значимости α.
Формулы для расчета доверительных интервалов имеют следующий вид:
https://pandia.ru/text/78/146/images/image045_3.jpg" width="188" height="62">
где t γ – значение случайной величины, подчиняющейся стандартному нормальному распределению, соответствующее вероятности γ = 1 – α/2 (α – уровень значимости);
z’ = Z (rxy) – значение Z- распределения Фишера, соответствующее полученному значению линейного коэффициента корреляции rxy .
Граничные значения доверительного интервала (r– , r+ ) для rxy получаются
из граничных значений доверительного интервала (z– , z+ ) для z с помощью
функции, обратной Z- распределению Фишера

1.6. Точечный и интервальный прогноз по уравнению линейной
регрессии
Точечный прогноз заключается в получении прогнозного значения уp , которое определяется путем подстановки в уравнение регрессии
соответствующего (прогнозного
) значения x
p
![]()
Интервальный прогноз заключается в построении доверительного интервала прогноза, т. е. нижней и верхней границ уpmin, уpmax интервала, содержащего точную величину для прогнозного значения https://pandia.ru/text/78/146/images/image050_2.jpg" width="37" height="44 src=">
и затем строится доверительный интервал прогноза , т. е. определяются нижняя и верхняя границы интервала прогноза

Контрольные вопросы:
1. Что понимается под парной регрессией?
2. Какие задачи решаются при построении уравнения регрессии?
3. Какие методы применяются для выбора вида модели регрессии?
4. Какие функции чаще всего используются для построения уравнения парной регрессии?
5. Какой вид имеет система нормальных уравнений метода наименьших квадратов в случае линейной регрессии?
6. Какой вид имеет система нормальных уравнений метода наименьших квадратов в случае гиперболической, показательной регрессии?
7. По какой формуле вычисляется линейный коэффициент парной корреляции r xy ?
8. Как строится доверительный интервал для линейного коэффициента парной корреляции?
9. Как вычисляется индекс корреляции?
10. Как вычисляется и что показывает индекс детерминации?
11. Как проверяется значимость уравнения регрессии и отдельных коэффициентов?
12. Как строится доверительный интервал прогноза в случае линейной регрессии?
Лабораторная работа № 1
Задание.1 На основании данных табл. П1 для соответствующего варианта (табл. 1.1):
1. Вычислить линейный коэффициент парной корреляции.
2. Проверить значимость коэффициента парной корреляции.
3. Построить доверительный интервал для линейного коэффициента парной корреляции.
Задание. 2 На основании данных табл. П1 для соответствующего варианта (табл. 1.1):
1. Построить предложенные уравнения регрессии, включая линейную регрессию.
2. Вычислить индексы парной корреляции для каждого уравнения.
3. Проверить значимость уравнений регрессии и отдельных коэффициентов линейного уравнения.
4. Определить лучшее уравнение регрессии на основе средней ошибки аппроксимации.
5. Построить интервальный прогноз для значения x = x max для линейного
уравнения регрессии.
Требования к оформлению результатов
Отчет о лабораторной работе должен содержать разделы:
1. Описание задания;
2. Описание решения лабораторной работы (по этапам);
3. Изложение полученных результатов.

Таблица П1
Исходные данные к лабораторным работам № 1, 2
Наличие предметов длительного пользования в домашних хозяйствах по регионам Российской Федерации (европейская часть территории без республик Северного Кавказа) (по материалам выборочного обследования бюджетов домашних хозяйств; на 100 домохозяйств; штук)



