Kit robótico Coche Robot de dos ruedas. Montaje de robots autopropulsados con Arduino
Entiendes”, explicó el editor, “debe ser entretenido, fresco, lleno de aventuras interesantes... Para que el lector no pueda separarse.
I. Ilf, E. Petrov "Cómo se creó Robinson".
Siempre es más interesante empezar a trabajar con Arduino, como con cualquier otra plataforma de software o hardware, con algún proyecto real. Al mismo tiempo, los programadores escriben un código que muestra "Hola, mundo" y los arduinistas hacen parpadear el LED. Y todos son felices como niños.
Decidí comenzar con un proyecto avanzado, que incluía la esperanza secreta de alejar a la generación más joven de Counter-Strike (no funcionó).
Como puedes adivinar por el nombre RoboCar4W, el primer proyecto fue un coche robot de cuatro ruedas. Cuando comencé a trabajar, ya tenía experiencia en programación, sabía soldar hace mucho tiempo, pero ni siquiera conocía el pinout de Arduino y no leí la documentación en absoluto. Estudié toda la sabiduría durante la obra y Google me ayudó.
Dado que el proyecto en sí no es fundamentalmente nuevo, hay suficientes descripciones similares en Internet, se conocen todos los componentes y no se esperaban sorpresas. Por lo tanto, la idea se formuló en los términos más generales y el objetivo principal era sumergirnos en el “mundo de las cosas” utilizando Arduino como plataforma para la creación rápida de prototipos. En esta obra, tal vez alguien se reconozca desde el comienzo de su viaje.
Todo el hardware se compró en eBay y, desde mi propia experiencia, me gustaría decir que es más fácil comprar un kit de inicio de inmediato (busque Arduino Starter Kit) que ensamblarlo en detalle. Sí, y todo llegará de una vez. Se decidió no perder el tiempo en nimiedades, comprar un chasis normal, ruedas normales, motores normales, para que saliera “caro”.
El principal secreto para realizar compras exitosas en eBay es comprar a vendedores altamente calificados y al mismo tiempo leer atentamente la descripción del producto. Hay muchos artículos sobre esto en Internet.
¿Qué placa Arduino debo elegir?
Tomé Arduino UNO, hay muchos proyectos con descripciones. Pero ahora me quedaría con el Arduino Mega 2560, tiene más salidas digitales y analógicas y es totalmente compatible con proyectos UNO.
Descripción general del proyecto.
En el mundo del desarrollo de software, estos también se denominan "requisitos del sistema".
La idea del proyecto era la siguiente. La primera versión del automóvil robótico, llamada RoboCar4W, debería realizar acciones simples:
- avanzar, retroceder, girar
- medir la distancia a los obstáculos
- ser capaz de evitar automáticamente los obstáculos que se encuentran por delante.
La segunda versión de la máquina debe controlarse manualmente mediante bluetooth desde un teléfono Android.
Para mejorar su trabajo, aquí está ensamblado el proyecto final completo de RoboCar4W (aquí sin Bluetooth).
Aquí tenéis un vídeo de las pruebas en el mar.
En el primer vídeo, RoboCar4W conduce en modo automático evitando obstáculos en dos versiones diferentes del firmware, es decir. boceto, así que si alguien tiene más vista de águila y notó que el comportamiento del robot en diferentes episodios es ligeramente diferente.
En el segundo vídeo, RoboCar4W se mueve mediante comandos transmitidos por el “conductor” vía Bluetooth desde un teléfono móvil Android. El teléfono tiene instalado el programa “Bluetooth RC Car”. Además, si hay un obstáculo cerca, el robot se detiene, es decir. No podrás embestir nada (sin embargo, hay un botón "secreto" que desactiva el modo seguro).
En el tercer vídeo, RoboCar4W muestra un programa de demostración preprogramado para conducir por curvas. El programa de demostración se activa mediante comando desde el mismo teléfono móvil Android. El robot simplemente conduce durante un rato y gira.
Algoritmo de control de movimiento
Es un error llamar a nuestro método "algoritmo para evitar obstáculos" o "búsqueda de caminos". Éstas son disciplinas matemáticas separadas, matemáticas puras. Si realmente te gustan las matemáticas, busca en Google las frases indicadas, se te proporcionará material de lectura durante seis meses.
Por ahora, nos interesan cosas mucho más simples. Por lo tanto, lo llamaremos simplemente: algoritmo para controlar el movimiento de un robot de 4 ruedas. Por supuesto, estamos hablando de control automático sin intervención humana.
Este algoritmo simple está escrito en palabras; para algoritmos más complejos tendrás que (lo quieras o no) elaborar diagramas de flujo.
- Medimos la distancia hasta el obstáculo que tenemos delante.
- Si esta distancia medida es menor que el valor de DST_TRH_BACK (abreviatura de umbral de distancia), entonces nos detenemos y conducimos en reversa mientras giramos. Elegimos el sentido de giro de la siguiente manera: si ya hemos girado a la izquierda, giramos a la derecha y viceversa.
- Si la distancia medida es mayor que DST_TRH_BACK, pero menor que DST_TRH_TURN, simplemente giramos. El sentido de rotación se elige al azar.
- Si el obstáculo está lejos, simplemente seguimos adelante.
- Repetimos todo desde el principio.
¿Qué tiene de bueno tener 4 ruedas y todo movido? Podemos realizar (programar) varios tipos de giros:
- Giro suave. Todas las ruedas giran, pero las ruedas de un lado giran más rápido.
- Chanclas. Las ruedas solo giran hacia un lado.
- Cambio de sentido en el acto. Como en un tractor, las ruedas de un lado giran hacia atrás y las del otro lado giran hacia adelante.
En la segunda versión del programa, cuando se controla desde un teléfono Android, el modo seguro, cuando el robot intenta evitar colisiones frontales, se puede desactivar presionando el botón dos veces en el programa.
y lo volvió a encender presionándolo una vez.
Nota importante. Toda la lógica está controlada por Arduino. Android aquí simplemente actúa como un control remoto de juego (sin cerebro) desde la consola, su tarea es transmitir estúpidamente pulsaciones de botones (es decir, comandos) a través de Bluetooth al Arduino RoboCar4W.
Componentes
Originalmente, la máquina incluía un servoaccionamiento que hacía girar el distanciómetro ultrasónico en un cierto ángulo para medir en tres direcciones. Pero durante las pruebas, debido a un manejo descuidado, el servoaccionamiento se quemó, por lo que ahora el sensor de distancia simplemente se fija rígidamente delante de la carcasa.
Cada nube tiene un lado positivo, pero el boceto se ha vuelto un poco más simple.
Para el futuro, compre el servoaccionamiento más simple y económico; no se necesitan potencia especial, velocidad y precisión de rotación en un ángulo determinado, y resultó que es bastante fácil dañar el servo. El SG90 de $2 funcionará bien.
Entonces, los componentes del proyecto RoboCar4W, se proporciona una descripción en inglés para facilitar la búsqueda en eBay y similares:
- Arduino UNO R3
- Chasis listo para usar, plataforma de Robot móvil con tracción en las 4 ruedas, chasis de coche inteligente Compatible con Arduino
- Motores de corriente continua (CC) con rotación en ambos sentidos - 4 uds.
- Ruedas - 4 uds.
- Placa para controlar 4 motores DC Motor Drive Shield L293D
- Medidor de distancia ultrasónico HC-SR04 Sensor de medición de distancia del módulo ultrasónico
- Pilas Ni-MH 1,2 V - 8 uds.
- Soporte de caja de plástico para baterías, Soporte de caja de baterías 4 pilas AA - 2 uds.
- Batería tipo “Krona” 8,4 V - 1 ud.
- Interruptor de palanca opcional - interruptor de encendido
El chasis, los motores DC y las ruedas se adquirieron inmediatamente como kit e incluso con instrucciones de montaje.
Las entradas analógicas se pueden utilizar como pines de E/S digitales. Los pines Arduino correspondientes a las entradas analógicas están numerados del 14 al 19. Esto se refiere únicamente a los pines Arduino y no a los números de pines físicos del microcontrolador Atmega.
No tienes que dibujar, simplemente puedes poner todo en una mesa. Lo hice así.

Los pines D4, D7, D8, D12 estarán ocupados si se utilizan motores de CC o motores paso a paso.
Los pines D9 (control del servo n.° 1) y D10 (control del servo n.° 2) solo estarán ocupados si se utilizan servos.
La placa en sí para controlar los motores Motor Drive Shield L293D no ocupa pines Arduino.
Los pines de alimentación de 3,3 V, 5 V y tierra están duplicados en el protector del motor en cantidades suficientes. Por tanto, no hay necesidad de preocuparse por su escasez.
Si aún quieres dibujar maravillosamente, el programa gratuito Fritzing te ayudará.
Este es el segundo punto muy importante. Mucho depende de la nutrición. Por ejemplo, un servomotor comienza a consumir una gran corriente al girar el eje en un ángulo determinado. Además, si el servo está conectado a una fuente de alimentación Arduino de 5 V, se produce una caída de voltaje y el resto del circuito comienza a fallar, y el Arduino puede incluso reiniciarse al mismo tiempo.
En cualquier caso, si utiliza motores en su nave, entonces es necesario un protector de accionamiento del motor (o un circuito similar).
Entonces, tenemos 4 motores de corriente continua (DC), un servoaccionamiento, la propia placa Arduino y varios sensores. Los motores son los que más energía consumen, pero los sensores se pueden alimentar con éxito desde los conectores de la propia placa Arduino, por lo que con ellos todo es sencillo. Por conveniencia, he resumido todo el hogar en una tabla.
| Tensión recomendada o típica. Consumo actual | Tensión máxima | ¿Qué planeas comer? | Notas | |
|---|---|---|---|---|
| Placa Arduino UNO R3 | 7 - 12 V, 200 mA (promedio) | 6 - 20 | "Krona 9V" Li-ion 650mAh, 8.4V | Conector con positivo en el centro. |
| Servomotor MG-995 | 5-6 V, 0,1 - 0,3 A (pico) | 4.8 - 7.2 | Baterías (5) uds. Ni-Mh 1,2 V = 6 V | La energía se suministra únicamente desde una fuente separada. Si lo enciendes junto con el Arduino, todo fallará. Baterías Ni-Mh de voltaje 4 uds. * 1,2V = 4,8V no es suficiente. Algunos argumentan que este servo no debe usarse a 6 voltios, solo a 4,8 |
| Motores CC (4 uds.) | 6 - 8V, corriente de 70mA a 250mA | 3 - 12 | pilas (5+3) uds. Ni-Mh 1,2 V = 9,6 V | No podrás hacer funcionar los motores correctamente con una batería de 9 V, ¡así que ni siquiera pierdas el tiempo (y las baterías)! |
| Escudo de accionamiento del motor L293D | no requerido | 4.5 - 36 | no requerido | |
| Módulo Bluetooth HC-0506 | 3,3 V, 50 mA | 1.8-3.6 | Desde el pin de 3.3V de la placa Arduino | |
| Medidor de distancia ultrasónico HC-SR04 | 5 V, 2 mA | 5 | Desde el pin de 5V de la placa Arduino |
No tenía un convertidor de voltaje CC/CC disponible. Krona 9V resultó no ser una muy buena fuente de energía, simplemente ya la tenía.
Pero me negué a utilizar baterías de iones de litio de alta capacidad. En primer lugar, por el elevado coste y, en segundo lugar, en las tiendas online chinas es fácil toparse con una falsificación. Más precisamente, no "fácil", sino "siempre". Además, el Li-ion requiere un manejo especial y no es seguro.
Entonces, como vemos en la tabla, necesitamos 3 fuentes de energía independientes:
- Para placa Arduino y sensores.
- Para servomotor.
- Para 4 motores CC.
¿Dónde puedo conseguir tanto? En cualquier caso, la propia placa Arduino debe recibir alimentación de una fuente independiente, porque Cuando el voltaje "baja", por ejemplo, al encender los motores, la placa puede reiniciarse o simplemente fallar. Aquí usamos una batería del factor de forma Krona 9V, y el conector que se conectará al Arduino debe tener un "más en el centro".
Para un servomotor y 4 motores de CC, puede arreglárselas con una fuente de energía. El único problema es que el servomotor está diseñado para un voltaje de 5-6 V (máximo 7,2 V) y una corriente de 100 - 300 mA (pico), mientras que los motores de CC requieren 6 - 8 V (máximo 12 V) y una corriente de 250 mA.
Para solucionar el problema, existen convertidores DC-DC, pero yo no tenía ninguno. Como resultado, utilicé mi esquema de conexión "patentado" (¡sin circuitos electrónicos reductores, solo voltaje y corriente ecológicos!): Conecté 8 piezas. Baterías de 1,2 V en serie y grifos realizados en los lugares correctos, como se muestra en el diagrama.

6V fueron al servomotor y 9,6 a los motores de CC. Está claro que las baterías 1 a 5 experimentarán una mayor carga.
Para controlar los servomotores y los motores de CC utilicé un Motor Drive Shield de 4 canales basado en el chip L293D.
Montar el chasis terminado es un pequeño problema. Pero no creas que sin terminarlo todo se arreglará enseguida. Así que prepare sus limas de agujas.


Normalmente no es posible conectar varios motores, un servomotor o un motor paso a paso directamente al Arduino. Dado que los pines (conclusiones) de Arduino son de baja corriente. Para resolver el problema, existe un módulo de control de accionamiento adicional: Motor Drive Shield basado en el chip L293D, que es uno de los chips más comunes diseñados para este propósito. El chip L293D también se conoce como H-Bridge.
Utilicé una placa que proporciona 4 canales de conectividad en dos chips L293D y un registro de desplazamiento. Disponible en eBay por $5.
Esta placa del módulo de control del variador tiene las siguientes características.
- Escudo de accionamiento de motor L293D compatible con Arduino Mega 1280 y 2560, UNO, Duemilanove, Diecimila
- control de 4 canales
- Alimentación del motor de 4,5V a 36V.
- corriente de carga permitida 600 mA por canal, corriente máxima - 1,2 A
- protección contra sobrecalentamiento
- 2 interfaces con un temporizador Arduino preciso (no habrá "jitter") para conectar servomotores a un voltaje de 5 V, si se necesita un voltaje de suministro mayor, entonces la conexión de alimentación debe rehacerse como se describe a continuación;
- Puede controlar simultáneamente 4 motores conmutadores CC bidireccionales o 2 motores paso a paso y 2 servomotores
- 4 motores CC bidireccionales, cada uno conectado a un bus de 8 bits para selección de velocidad individual
- conexión de hasta 2 motores paso a paso (unipolar o bipolar), bobina simple, bobina doble o paso alterno
- Conector para conectar una fuente externa para el suministro de energía independiente de la lógica de control y los motores.
- Botón RESET de Arduino
- La biblioteca Adafruit AFMotor se utiliza para el control.
Motor Drive Shield requiere una pequeña modificación para poder conectar cualquier cosa después. Soldé los conectores necesarios encima y esto es lo que pasó.

Los motores se pueden conectar a una fuente de alimentación adicional a la placa Arduino. Este es el método de conexión que recomiendo. Para hacer esto, debe quitar y abrir el puente, como se muestra en la imagen.

En este caso, el Arduino se alimenta y los motores se alimentan de forma independiente unos de otros.
El LED en el protector del motor se enciende cuando hay energía para los motores; si no está encendido, los motores no funcionarán.
Nuevo problema.
La posición del puente de alimentación no afecta a los servomotores; seguirán siendo alimentados por el Arduino de 5V. Dado que los servos suelen consumir mucha corriente y si no hay suficiente energía, todo el dispositivo comienza a fallar, en el "mejor" caso, solo fallará el servo: no girará en un ángulo determinado, o todo el tiempo antes; En cada giro, girará primero a 0 grados, y solo luego en un ángulo determinado (y si tiene tiempo). Por lo tanto, recomiendo alimentar el servoaccionamiento también desde una fuente de alimentación adicional. Para hacer esto, tendrá que modificar ligeramente el diagrama de conexión: corte el cable positivo (generalmente rojo) del conector estándar y conéctelo directamente al positivo de la fuente de alimentación.

Al conectar el Motor Drive Shield, no se utilizan pines analógicos. Los pines digitales 2, 13 no se utilizan.
Los pines siguientes solo se utilizan si se conectan y utilizan motores de CC o motores paso a paso adecuados:
- D11: Motor DC #1 / Paso a paso #1 (activación y control de velocidad)
- D3: Motor DC #2 / Paso a paso #1 (activación y control de velocidad)
- D5: Motor DC #3 / Paso a paso #2 (activación y control de velocidad)
- D6: Motor DC #4 / Paso a paso #2 (activación y control de velocidad)
Estos pines estarán ocupados si se utiliza algún DC/paso a paso: D4, D7, D8, D12.
Los siguientes pines sólo estarán ocupados si se utilizan los servos correspondientes:
- D9: control del servo n.° 1
- D10: control del servo n.º 2

Para comenzar con Motor Drive Shield, debe descargar e instalar la biblioteca Adafruit AFMotor.
Código de ejemplo para controlar motores:
#incluir
Mi motor de CC empezó a girar sólo cuando la velocidad estaba fijada en más de 100; si era menor, simplemente zumbaba. Tendrás que determinar experimentalmente la velocidad mínima de tu motor.
Para los motores conectados a M1 y M2, puede configurar la frecuencia: MOTOR12_64KHZ, MOTOR12_8KHZ, MOTOR12_2KHZ, MOTOR12_1KHZ. La velocidad de rotación más alta se logra a 64KHz, esta frecuencia será audible, menor frecuencia y velocidad a 1KHz pero también usa menos energía. Los motores 3 y 4 siempre funcionan a 1 KHz; los demás valores se ignoran. El valor predeterminado es 1 KHz en todas partes.
Después de esto, deberá realizar una prueba del motor. . Al comienzo del boceto, cambie el número del motor en una línea (o líneas) como:
AF_DCMotor(...);
El boceto hace girar los motores hacia adelante mientras el robot se mueve por un tiempo y luego hacia atrás. Mire con atención para ver si el motor gira en la dirección incorrecta y cambie la polaridad de la conexión si es necesario.
Conectamos el distanciómetro ultrasónico Módulo Ultrasónico HC-SR04. Configuración de pines:
- Disparo(T)
- Eco (R)
Tiempo dedicado por un telémetro ultrasónico a las mediciones (determinado experimentalmente):
- máximo 240 ms si la distancia es demasiado grande (fuera de rango)
- mínimo 1 ms si la distancia es demasiado corta
- una distancia de 1,5 m se determina en aproximadamente 10 ms

El sensor ultrasónico del telémetro, por su naturaleza física, y no porque China, en algunos casos determina mal la distancia a un obstáculo:
- si el obstáculo tiene una forma compleja, entonces el ultrasonido se refleja en diferentes ángulos y el sensor se equivoca,
- El ultrasonido es perfectamente absorbido (es decir, no reflejado) por muebles tapizados o juguetes, y el sensor cree que no hay nada delante.
En otras palabras, lo ideal para un telémetro ultrasónico sería fantástico si todos los obstáculos tuvieran la forma de un plano sólido perpendicular a la dirección de la radiación ultrasónica.
Algunos problemas se pueden solucionar utilizando un sensor de distancia por infrarrojos. Pero tampoco es perfecto:
- alcance máximo pequeño en comparación con el ultrasonido: 0,3-0,8 m frente a 4 m
- Distancia mínima grande en comparación con los ultrasonidos: 10 cm frente a 2 cm
- Dependencia de la sensibilidad del sensor de la iluminación general.
Aunque si estos telémetros se instalaran por parejas, su rendimiento aumentaría notablemente.
Conecte Bluetooth HC-05
Como podemos ver en la hoja de datos, los pines principales del HC-05 “desnudo”:
- Transmisión TX (pin 1)
- Recepción RX (pin 2)
- Fuente de alimentación de 3,3 V (pin 12) 3,3 V
- GND (pin 13) tierra
- Indicador de modo PIO8 (pin 31)
- Estado de conexión PIO9 (pin 32), si se establece la conexión, la salida será alta
- PIO11 (pin 34) para habilitar el modo de comando AT
Nuestro módulo está soldado a la placa base/conexión, que ya tiene un divisor de voltaje, por lo que su rango de voltaje de funcionamiento es de 3,3 V a 6 V.
Conectamos nuestro conjunto de módulo Bluetooth:
- Arduino (TX) - (RX) HC-05
- Arduino (RX) - (TX) HC-05
- Arduino (+5V) - (VCC)Bluetooth
- Arduino (GND) - (GND) Bluetooth
- Los pines LED y KEY no se utilizan
Después de que se suministra energía al módulo Bluetooth HC-05, el LED debe parpadear, lo que significa que Bluetooth está funcionando.
Encendemos el bluetooth en el móvil, buscamos el dispositivo con el nombre HC-05 y nos conectamos, la contraseña es 1234.
Para realizar pruebas, cargue un boceto simple en Arduino:
recuento int = 0; void setup() ( Serial.begin(9600); Serial.println("Prueba Arduino + Bluetooth. http://localhost"); ) void loop() ( count++; Serial.print("Count = "); Serial. println(cuenta); retraso(1000);
En un teléfono Android instalamos Terminal Bluetooth. Nos conectamos al dispositivo HC-05 y miramos las líneas con un contador creciente en la pantalla del teléfono.
Para que el módulo acepte comandos AT, se debe poner en el modo apropiado; para hacer esto, debe configurar el pin KEY (PIO11) en la lógica 1. En algunas placas base/de ruptura, en lugar del pin KEY, hay un pin EN (HABILITAR), que puede estar soldado o no a un pin en el propio chip. Esto sólo se aplica a los chips HC05. Es solo que mi pin EN del tablero no está soldado en ninguna parte. Por lo tanto, se puede soldar con un cable separado al pin KEY(PIO11) del chip. O, durante la operación, para cambiar el HC05 al modo de comando AT, cortocircuite el pin del chip KEY(PIO11) al pin de alimentación Vcc durante un par de segundos. Para HC06, el pin KEY no es necesario.
Software
Nota. Cada vez que cargue un programa en el Arduino, asegúrese de que el módulo Bluetooth no esté conectado al Arduino. Esto causará problemas para completar el boceto. Simplemente desconecte la alimentación del módulo Bluetooth o los cables que conectan el Arduino y los pines RX, TX del módulo.
Al comienzo del boceto, cambie los números de motor en líneas como:
AF_DCMotor(...);
Si reemplazas la línea
depuración de bytes = 0;
depuración de bytes = 10;
entonces se activará el modo de depuración.
En el modo de depuración, el robot RoboCar4W en realidad no conducirá ni hará girar sus ruedas. En su lugar, active el monitor del puerto serie y vea cómo “conduce” virtualmente. En lugar de avanzar realmente, la cadena "Adelante" se escribirá en el monitor del puerto serie, en lugar de retroceder con un giro a la izquierda - "Voltear hacia atrás L (eft)", etc. El sensor de distancia ultrasónico tampoco hace nada, sino que las distancias a los obstáculos se generan de forma programática y aleatoria.
Agregar etiquetasHablemos de cómo puedes usar Arduino para crear un robot que se equilibre como un Segway.
Segway del inglés. Segway es un vehículo de dos ruedas equipado con propulsión eléctrica. También se les llama hoverboards o patinetes eléctricos.
¿Alguna vez te has preguntado cómo funciona un Segway? En este tutorial intentaremos mostrarte cómo hacer un robot Arduino que se equilibre como un Segway.
Para equilibrar el robot, los motores deben resistir la caída del robot. Esta acción requiere retroalimentación y elementos correctivos. Elemento de retroalimentación: que proporciona aceleración y rotación en los tres ejes (). Arduino usa esto para conocer la orientación actual del robot. El elemento correctivo es la combinación de motor y rueda.

El resultado final debería ser algo como esto:
diagrama de robot


Módulo controlador de motor L298N:

Motorreductor CC con rueda:

Un robot que se autoequilibra es esencialmente un péndulo invertido. Puede estar mejor equilibrado si el centro de masa está más alto en relación con los ejes de las ruedas. Un centro de masa más alto significa un mayor momento de inercia de la masa, lo que corresponde a una menor aceleración angular (caída más lenta). Por eso ponemos la batería encima. Sin embargo, la altura del robot se eligió en función de la disponibilidad de materiales :)

La versión completa del robot autoequilibrado se puede ver en la figura de arriba. En la parte superior hay seis baterías de Ni-Cd para alimentar la PCB. Entre los motores se utiliza una batería de 9 voltios como controlador del motor.
Teoría
En teoría del control, mantener alguna variable (en este caso la posición del robot) requiere un controlador especial llamado PID (derivado integral proporcional). Cada uno de estos parámetros tiene una "ganancia", normalmente denominada Kp, Ki y Kd. El PID proporciona corrección entre el valor deseado (o entrada) y el valor real (o salida). La diferencia entre entrada y salida se llama "error".
El controlador PID reduce el error al valor más pequeño posible ajustando continuamente la salida. En nuestro robot autoequilibrado Arduino, la entrada (que es la inclinación deseada en grados) se establece mediante software. El MPU6050 lee la inclinación actual del robot y la envía al algoritmo PID, que realiza cálculos para controlar el motor y mantener el robot en posición vertical.
El PID requiere que los valores de Kp, Ki y Kd se ajusten a valores óptimos. Los ingenieros utilizan software como MATLAB para calcular automáticamente estos valores. Desafortunadamente, no podemos usar MATLAB en nuestro caso porque complicará aún más el proyecto. En cambio, ajustaremos los valores de PID. He aquí cómo hacerlo:
- Haga que Kp, Ki y Kd sean iguales a cero.
- Ajustar Kp. Un Kp demasiado pequeño provocará la caída del robot porque la corrección no es suficiente. Demasiado Kp hace que el robot se mueva frenéticamente de un lado a otro. Un buen Kp hará que el robot se mueva bastante hacia adelante y hacia atrás (o oscile un poco).
- Una vez establecido Kp, ajuste Kd. Un buen valor de Kd reducirá las oscilaciones hasta que el robot se vuelva casi estable. Además, el Kd correcto sujetará el robot incluso si lo empujan.
- Finalmente, instale Ki. Cuando se enciende, el robot oscilará incluso si se configuran Kp y Kd, pero se estabilizará con el tiempo. El valor Ki correcto reducirá el tiempo necesario para estabilizar el robot.
El comportamiento del robot se puede ver en el siguiente vídeo:
Código Arduino para robot autoequilibrado
Necesitábamos cuatro bibliotecas externas para crear nuestro robot. La biblioteca PID simplifica el cálculo de los valores P, I y D. La biblioteca LMotorController se utiliza para controlar dos motores con el módulo L298N. La biblioteca I2Cdev y la biblioteca MPU6050_6_Axis_MotionApps20 están diseñadas para leer datos del MPU6050. Puede descargar el código, incluidas las bibliotecas, en este repositorio.
#incluir
Los valores Kp, Ki, Kd pueden funcionar o no. Si no es así, siga los pasos anteriores. Tenga en cuenta que la inclinación en el código está establecida en 173 grados. Puedes cambiar este valor si lo deseas, pero ten en cuenta que este es el ángulo de inclinación que debe mantener el robot. Además, si sus motores son demasiado rápidos, puede ajustar los valores de motorSpeedFactorLeft y motorSpeedFactorRight.
Eso es todo por ahora. Nos vemos.
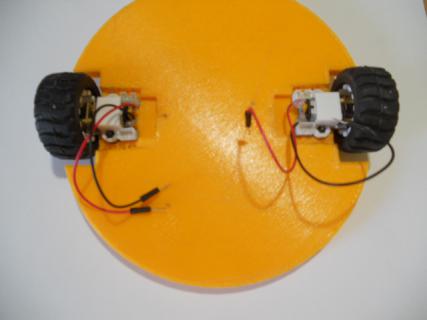
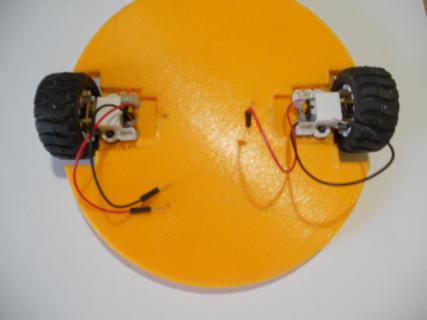
En este artículo construiremos nuestro propio robot desde cero. Lo que obtenemos, mira la foto de abajo. El robot conducirá tanto de forma independiente como bajo el control de un teléfono inteligente. También veremos cómo construir su propio robot móvil desde cero.
3 Dimpresora
Si quiero construir un robot, debo decidir la plataforma sobre la que instalaré motores, placas y baterías. Por supuesto, puedo comprar una versión ya preparada, pero es más interesante crear la plataforma usted mismo. Una plataforma de este tipo definitivamente satisfará sus necesidades. La plataforma se puede realizar desde org. Vidrio, madera contrachapada y lo haré de plástico.
Se puede decir que hacer la plataforma usted mismo es un inconveniente y requerirá muchas herramientas, desde un punzón hasta una rectificadora. Y digo que necesitaremos imaginación y una impresora 3D.

¿Impresora 3D? Probablemente todo el mundo esté familiarizado con una impresora de oficina normal que pueda imprimir el texto que necesitamos en formato A4. Entonces, una impresora 3D es una impresora que puede imprimir la pieza deseada. Existen diferentes impresoras 3D. Tengo una impresora con tecnología FDM (deposición capa por capa). Puede averiguar qué otras tecnologías de impresión 3D están disponibles en Internet.
Muchas impresoras 3D funcionan con Arduino. Si lo deseas, puedes montar tu propia impresora 3D. La idea principal de una impresora 3D es que puedes imprimir absolutamente cualquier cosa, pero imprimiremos un cuerpo para un robot.
Primero, definamos la descripción de la plataforma. Quiero que la plataforma tenga dos ruedas y acomode un Arduino, potencia, motores y algunos sensores.
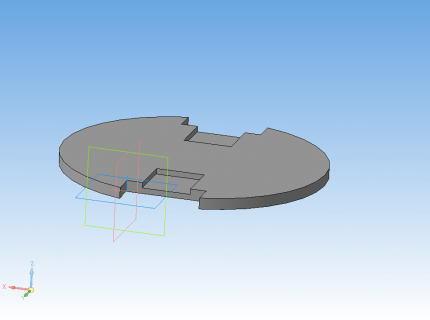
Ahora necesita dibujar un diseño de la plataforma en papel y colocar los componentes necesarios en ella. Por ejemplo, así.

Cuando el diseño esté listo, necesitarás hacer un modelo 3D de la plataforma. Hay muchos programas para esto. Yo suelo utilizar. No enseñaré cómo trabajar con Compass, pero si estás interesado, puedes buscar en Internet o pedir en los comentarios que hagan una lección sobre Compass.
Esta es la plataforma con la que terminé.
Después de esto, necesitas convertir el modelo 3D en código G que la impresora 3D pueda entender. Hay programas especiales para esto: cortadoras. Utilizo el programa Repetier-Host con la cortadora Sli3er. Así es como se ve la pieza lista para imprimir.

Y aquí está el modelo impreso.
Hace poco se nos ocurrió una idea y la pieza terminada ya está ante nosotros. Con una impresora 3D puedes crear cosas únicas en copias individuales. La impresora 3D es algo genial. ¡Se lo recomiendo a todos!
motores
Ahora tenemos que pensar en cómo se moverá nuestro robot móvil. Lo primero que me viene a la mente son las ruedas. Eso es lo que haremos.
Si alguien recuerda, ya intentamos conectar el motor a Arduino. Para aquellos que no recuerdan, no saben o no han leído, eche un vistazo. Existen importantes inconvenientes al conectar un motor mediante un MOSFET: es imposible cambiar rápidamente la velocidad y la dirección de rotación. ¡Es hora de enseñarle a Arduino cómo controlar motores de verdad!
Para hacer esto, puedes usar el chip L293D. El L293D le permite controlar dos motores a la vez, con una corriente de 600 mA por canal y una corriente máxima de hasta 1000 mA, y si combina canales, hasta 1200 mA y 2000 mA de corriente máxima. Te contaré sobre la fusión a continuación.
Para empezar, como siempre, debes mirar la Hoja de datos para saber dónde y qué conectar. Si no conoce los microcircuitos, vale la pena leer el artículo.
Empecemos. Armamos un circuito simple con un motor y lo dirigimos. Preste atención al diagrama de montaje.

Si no sabes inglés o simplemente no entiendes la hoja de datos, aquí tienes una descripción de la conexión. Espero que todos sepan la numeración de microcircuitos o hayan aprendido del artículo sobre microcircuitos.
- Pin 1 – Responsable de la velocidad de rotación del motor. Hay uno similar en el pin 9. Toma valores de 0 a 255, que se pueden organizar fácilmente usando PWM. Conecté EN al quinto pin del Arduino, que admite PWM.
- Pines 2 y 7: responsables de la dirección de movimiento del motor. Hay similares en los pines 10 y 15. Aplicar uno lógico a uno de estos pines hará que el motor gire en una dirección (dependiendo de la conexión del motor), aplicar uno lógico al otro hará que el motor gire. en la dirección opuesta.
- Pines 3 y 6: debe conectarles el motor. La polaridad no es importante, sólo dependerá de la conexión el sentido de giro. Hay otros similares en los pines 11 y 14.
- Pines 4 y 5: este es el suelo. No creo que necesite ninguna explicación. Los similares son el 12 y el 13.
- Pin 8 – Alimentación de motores. Debe recibir alimentación en el rango de 4,5 a 36 Voltios.
- Pin 16: se le suministra una unidad lógica desde Arduino. 5 voltios, si eso.
¡Excelente! El motor está conectado. Ahora puedes codificar.
#define FRW_BUT 7 //Botón de avance #define BCW_BUT 6 //Botón de retroceso #define SPD 5 //Control de velocidad de rotación... #define FRW 4 //...dirección de rotación (adelante)... # define BCW 3 / /...dirección de rotación (hacia atrás) #define SPD_POT A5 int xspeed = 0; //Variable para determinar la velocidad de rotación del motor int frw_move = 0; //Variable para el comando "adelante" int bcw_move = 0; //Variable para el comando "atrás" void setup() ( //Denota los pines pinMode(SPD, OUTPUT); pinMode(FRW, OUTPUT); pinMode(BCW, OUTPUT); pinMode(SPD_POT, INPUT); pinMode(FRW_BUT , INPUT_PULLUP ); pinMode(BCW_BUT, INPUT_PULLUP); void loop() ( //Leer las lecturas del potenciómetro //y llevarlas al rango deseado - de 0 a 255 //Después de eso, las transferimos al ajuste de velocidad pin xspeed = analogRead(SPD_POT); constrain(xspeed, 0, 1023); 1; ) else ( frw_move = 0; ) //Determina presionando el botón Atrás if(!digitalRead(BCW_BUT)) ( bcw_move = 1; ) else ( bcw_move = 0; ) //Llama a la función para enviar datos al motor L293D( ); ( //Enviar datos a L293D analogWrite(SPD, xspeed); digitalWrite(FRW, frw_move); digitalWrite(BCW,bcw_move); )
¿Cómo funciona? Funciona de forma sencilla. Cuando presionas el botón izquierdo, la rueda gira en una dirección y cuando presionas el botón derecho, gira en la otra dirección. Girando el mando del potenciómetro se puede ajustar la velocidad de rotación del motor. Nuestra configuración de prueba de motor se muestra en acción en el vídeo.
zy Sí, sé que la calidad del vídeo no es muy buena, pero intentaré encontrar una cámara normal y organizar un lugar para filmar lo antes posible.
Ahora sobre la conexión de canales L293. Si quieres conectar un motor más potente, puedes combinar los canales.
La primera forma es conectar pines similares del microcircuito en paralelo, lo que duplicará la corriente máxima. La desventaja es que solo se puede conectar un motor a un chip.
La segunda forma es soldar otro L293 encima del L293. Tomamos y soldamos el pin 1 al pin 1, el pin 2 al pin 2 y así sucesivamente. Este método también duplica la intensidad de la corriente, pero, a diferencia del primero, deja la posibilidad de controlar dos motores a la vez. Quizás tengas una idea: ¿no debería soldar un par de L293 más? Desafortunadamente, la soldadura posterior de los microcircuitos no aumentará la corriente en otros 600 mA. El aumento será insignificante.
"Eh, tendré que quitarme el motor de 12 voltios..." No tengas prisa por enojarte. Para motores más potentes, el hermano mayor del L293, el L298, es adecuado, pero no lo consideraremos ahora. Haremos esto un poco más tarde.
Motor Blindaje
De acuerdo en que con un conjunto de cables así no se ve muy bien. Para deshacerse de él, puede soldar el circuito con L293 en una placa de circuito impreso o en una placa para soldar, pero ¿qué hacer si no quiere soldar o no sabe cómo? Para ello existen soluciones ya preparadas en forma de escudos para Arduino, por ejemplo. Les contaré sobre uno de ellos: Motor Shield V1 de DK Electronics.
De hecho, aquí tenéis una foto del escudo.
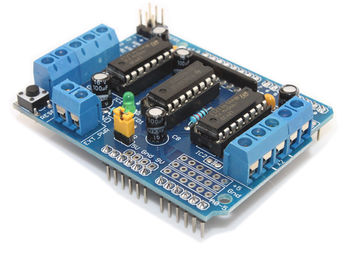
Este escudo tiene dos L293D instalados, lo que le permite controlar cuatro motores a la vez. También hay dos contactos para servomotores. La energía se suministra al bloque de terminales o, con un puente instalado, desde la fuente de alimentación de Arduino. El puente también le permite tomar energía para el Arduino desde el escudo. Hay una biblioteca especial para trabajar con este escudo. Puedes descargarlo.
A las desventajas del tablero. Casi todos los pines digitales se utilizan para trabajar con el escudo, excepto 0, 1, 2, 13. Como sabemos, Arduino utiliza los pines 0 y 1 para el firmware, por lo que es mejor no usarlos.
Hay un lado bueno en esto. Si no conectas servos, por ejemplo, se liberan los pines 9 y 10, y si no utilizas ninguno de los motores, se liberan los pines 3, 5, 6, 11, dependiendo del motor no utilizado. Y una cosa más. Seguimos teniendo acceso a seis salidas analógicas, que se pueden utilizar como salidas digitales si se desea.
Empecemos a conectar los motores. Por el bien del experimento, haremos un robot que se mueva hacia adelante, hacia atrás y también gire alrededor de su propio eje. Como plataforma, tomé mi propio desarrollo, descrito anteriormente. Puedes llevar lo que quieras, lo principal es que coincida con las características.
necesitaremos

- Arduino UNO: puede utilizar cualquier otro factor de forma de Arduino UNO. Leonardo o Iskra, por ejemplo.
- Escudo del motor: también funcionarán otras versiones de este escudo.
- Motores de 6V: puedes elegir cualquiera que coincida con las características del Motor Shield.
- Ruedas con un diámetro de 42 mm – Ruedas adecuadas para motores y plataforma.
- Soportes de motor: los motores deben estar conectados a la plataforma. Toma los que coincidan con el tuyo.
- Energía: tomé una batería y obtuve una salida de aproximadamente 5 voltios, que no es suficiente para alimentar los motores y Arduino, así que conecté un convertidor CC/CC y subí el voltaje a 9 V. Si no hay un convertidor, puede usar una corona normal conectándola a la fuente de alimentación de Arduino.
Es hora de montar nuestro robot.
Paso 1
Conexión de Arduino y Motor Shield.

Paso 2
Montamos los motores y los atornillamos a la plataforma.
Paso 3
Recopilamos energía a través de un convertidor elevador.

Para aquellos con enfermedad de Crohn. ¡No te olvides del jersey!

Paso 4
Atornillamos los motores al Shield del Motor con Arduino.
Paso 5
Añadiendo comida.

Paso 6 (opcional)
Coloquemos la tapa, por estética.

Tenemos un robot listo para usar. Ahora es el momento de programarlo. Miremos el código.
//Incluye la biblioteca para trabajar con Motor Shield #include
¡Excelente! Es hora de comprobarlo. Aquí hay un video de mi inspección. ¿Cómo estás?
"¿Dijiste algo sobre placas robóticas?" – pueden decir quienes hayan leído la lección introductoria de la parte 2 del curso. Sí, existen tales tableros. Considere la plataforma robótica Strela.
El sueño de un robotista. (Casi). Describí las ventajas de la junta. Directo al grano.
Lleva instalado el hermano mayor del L293, el L298. Y los pines salen en tres, lo cual es perfecto para conectar muchos sensores.
Esta placa se puede conectar en lugar de Arduino UNO y Motor Shield. Además, los chicos de Amperka escribieron una biblioteca para trabajar con Strela, lo que hace que controlar los motores sea una tarea bastante trivial.
Para los que no lo sabían, os lo cuento. Para cada biblioteca normal hay ejemplos de su uso, y la biblioteca de Strela no es una excepción. Para encontrarlos, vaya a Archivo -> Ejemplos -> pestaña Strela. Allí seleccionamos el ejemplo de StrelaMotors, donde ejecutamos un boceto similar al boceto usando Motor Shield. Por cierto, también hay ejemplos de Motor Shield. Si estás interesado, echa un vistazo.
¿Qué más se puede hacer con Arrow? Consulte a continuación. Y pasamos a la comunicación inalámbrica a través de Bluetooth.
bluetooth
Un robot que se mueve por la habitación es, por supuesto, bueno, pero a mí me gustaría dirigirlo yo solo. Para hacer esto, necesita organizar la comunicación entre Arduino y el dispositivo de control.
Elegí un teléfono inteligente como dispositivo de control. Organizaremos la comunicación mediante el protocolo Bluetooth, así que es hora de familiarizarnos.

Este es el módulo HC-06. No entraré en demasiados detalles, pero si a alguien le interesa, sigamos adelante. Nuestro objetivo es dirigir el robot desde un teléfono inteligente. Empecemos, supongo.
Primero necesitas conectar el HC-06 al Arduino. Nos conectaremos mediante Software Serial. Esta biblioteca nos permite emular el puerto serie en los pines que necesitemos. Por el bien del experimento, intentemos hacer esto en los pines A0(RX) y A1(TX). ¿Para qué? Recuerda lo que hablé sobre Motor Shield.
Nos conectamos así:
- Vcc – a 5V
- Tierra - a Tierra
- RX – a TX
- TX – a RX

Conectaré el HC-06 al robot que construimos arriba. Para ello utilizaremos las tres franjas del Motor Shield.

El robot está listo. Ya sólo queda programarlo.
Antes de leer el código, debes saber algo. Los motores no son perfectos, como todo en este mundo. Incluso dos motores del mismo lote, uno detrás del otro, serán ligeramente diferentes, lo que afectará la diferencia en el número de revoluciones con el mismo voltaje. Si simplemente conecta los motores al escudo del motor y les aplica la misma velocidad, y este es el mismo voltaje, entonces el robot no irá recto, sino un poco o mucho hacia un lado. Esto se puede ver en el vídeo de arriba.
Para evitarlo aplicaremos factores de ajuste. Mi rueda izquierda gira mucho más rápido que la derecha, así que establecí el coeficiente en 0,62 para compensar. El valor del coeficiente se selecciona experimentalmente.
// Incluye bibliotecas para trabajar con Motor Shield y Software Serial #include
El robot fue mostrado. Ahora echemos un vistazo al teléfono inteligente.
controlador RC
Hay muchas aplicaciones diferentes disponibles para comunicarse entre Arduino y un teléfono inteligente a través de Bluetooth. Las palabras clave de búsqueda serán: Arduino, Bluetooth, RC.
Elegí una aplicación llamada Bluetooth RC Controller. Es ideal para nuestro propósito. Cuando presiona un botón, la aplicación envía un valor de carácter al HC-06, que, a su vez, transmite el valor recibido al Arduino. El valor enviado cuando se hace clic en el botón es autoestablecido.

Para establecer una conexión con el robot, debe hacer clic en el engranaje y seleccionar "Configuración". En "Configuración" debe asegurarse de que los botones correspondan a estos caracteres enviados o cambiar el código Arduino.

Después de configurar los caracteres, puede establecer una conexión con el HC-06. Haga clic en el engranaje y vaya a "Conectar al automóvil". Se abre una ventana con dispositivos emparejados. En él seleccionamos HC-06. Si no está allí, búsquelo usando "Buscar dispositivos". Si encuentra el dispositivo, pero no quiere emparejarlo, vaya a Bluetooth en el teléfono inteligente y emparéjelo como de costumbre. La contraseña estándar es 1234. Después de eso, vaya a "Buscar dispositivos" y conéctese.

Cuando se establezca la conexión, la luz verde en la parte superior se encenderá y el HC-06 dejará de parpadear. Puedes empezar a conducir. La tira en la parte superior es responsable de la velocidad del movimiento.
Volvamos a Arrow. Otra ventaja de Strela es la posibilidad de instalar Bluetooth en formato XBee, y lo bueno es que el resto de pines quedan libres. Y dado que hay una biblioteca lista para usar para Strela que ayuda a reducir el código para controlar motores, vale la pena usar Strela para controlar el robot a través de Bluetooth.
Para hacer esto, necesita conectar el XBee al Strela, actualizarlo con el boceto de los ejemplos llamado "ArduinoBluetoothRCCarOnStrela" y conectarse al XBee a través del controlador RC.
Consejos
Mi robot está listo e incluso conduce cuando se lo ordena un teléfono inteligente. Pero no todo puede salir bien. Hablaré sobre algunos problemas y sus soluciones, y también daré algunos consejos a los aspirantes a robóticos.
Las ruedas no giran en la dirección deseada.– este problema se puede eliminar fácilmente reorganizando los cables en los bloques de terminales o utilizando software.
El módulo Bluetooth no funciona– debe comprobar si el LED rojo del módulo está encendido. Si no está encendido, verifique que el módulo Bluetooth esté conectado correctamente. Si el LED está encendido, pero la conexión está bien establecida, debe asegurarse de que el RX del módulo esté conectado al TX de la placa y viceversa, y también probar el método de emparejar el módulo con el Arduino a través de un Interfaz Bluetooth estándar.
El robot no conduce recto– Describí este problema un poco más arriba cuando hablé de Bluetooth y Motor Shield.
Mientras conduce, el robot se detiene repentinamente y pierde la conexión conHC-06– el problema está en la fuente de alimentación. Sabemos que Arduino necesita al menos 7 V para un funcionamiento estable y también sabemos que los motores consumen muy bien. Si lleva las sondas del multímetro a los bloques de terminales de suministro de voltaje y mide el voltaje con los motores apagados y luego los enciende, puede ver que el voltaje en el multímetro caerá. Además, el voltaje puede caer de diferentes maneras.
Si se conecta una fuente de alimentación que no puede proporcionar suficiente corriente para los motores, entonces el voltaje puede caer significativamente, de 9 a 5 voltios, por ejemplo, y 5 V ya no serán suficientes para el Arduino y se reiniciará. La solución es conectar energía más potente. Te diré cómo calcular a continuación.
Si conecta una fuente de alimentación más potente, es posible que la caída de voltaje solo se produzca durante unos pocos milisegundos, pero esto puede ser suficiente para reiniciar el controlador. La solución es instalar un condensador de al menos 1000 μF paralelo a los cables de alimentación; la capacitancia se puede determinar experimentalmente. Instalé un condensador de 3300 uF a 16V. No olvides mirar el voltaje máximo del capacitor.
Cuando la fuente de alimentación es lo suficientemente potente, la caída de voltaje no supera los 0,2 V.
Algunos consejos para aspirantes a robóticos
Al planificar un robot, es recomendable primero ocuparse de calcular la potencia de la unidad de potencia y seleccionar la fuente de energía adecuada. Sería una pena que 4 pilas AAA no alimentaran sus 4 motores de 6 voltios y no quedara espacio para más fuentes de energía.
Para calcular la potencia buscamos las características de motores, placas y sensores. Del curso de física sabemos que la potencia se puede calcular usando la fórmula P = UI, donde I es la intensidad de la corriente y U es el voltaje. Con esta fórmula y características, es fácil calcular el consumo de energía del dispositivo terminado y, conociendo el consumo de energía y el voltaje de suministro operativo, puede averiguar la intensidad de corriente óptima requerida para el funcionamiento del dispositivo, conociendo la intensidad de corriente. Puede determinar la capacidad requerida de la batería y el tiempo de funcionamiento del dispositivo a partir de la batería seleccionada.
Como dije, siempre debes establecer un objetivo específico, al lograrlo el proyecto se puede considerar completado. Hay matices en esta idea. Si el proyecto es lo suficientemente grande, llegar al objetivo no es tan fácil, especialmente cuando se escribe código. Una vez escribí mucho código y pensé: "¡Ahora escribiré todo y lo comprobaré!". ", cuando intenté compilar el código, no se compiló inmediatamente, ya que había varios errores. Eliminé los errores, pero el código no funcionó como quería. Tuve que reescribir todo casi desde cero, agregando código poco a poco y verificando la funcionalidad del código resultante. Te aconsejo que hagas lo mismo.
Si el objetivo es crear una “contraseña” de tres caracteres, entonces no debes programar los tres a la vez. Es mejor crear una contraseña de un carácter, verificarla, luego de dos y, después de verificar, de tres. Me ayuda.
El robot se crea mediante prueba y error. No es posible programarlo una vez para que una acción se realice perfectamente. Los mismos coeficientes de ajuste están sobre ruedas, por lo que no debes rendirte si algo no funciona, y si no funciona en absoluto, puedes contactar con personas amables en los foros o escribirme, nosotros. ¡Definitivamente te ayudaré!
Conclusión
¡La robótica es algo genial! Creo que pronto los robots ocuparán, o incluso ya han ocupado, un lugar en la vida de las personas. Hicimos un simple automóvil robot controlado desde un teléfono inteligente, luego pasaremos a proyectos más serios, pero por ahora, ¡hasta pronto!
Hola a todos. Este artículo es una breve historia sobre cómo hacer robot su manos. ¿Por qué una historia, preguntas? Esto se debe al hecho de que para la fabricación de tales artesanía es necesario utilizar una cantidad significativa de conocimientos, que es muy difícil presentar en un artículo. Recorreremos el proceso de construcción, echaremos un vistazo al código y, en última instancia, daremos vida a una creación de Silicon Valley. Te aconsejo que veas el vídeo para tener una idea de con qué deberías terminar.
Antes de continuar, tenga en cuenta lo siguiente: durante la fabricación artesanía Se utilizó una cortadora láser. Puedes evitar el uso de una cortadora láser si tienes suficiente experiencia trabajando con las manos. ¡La precisión es la clave para completar el proyecto con éxito!

Paso 1: ¿Cómo funciona?

El robot tiene 4 patas, con 3 servos en cada una de ellas, que le permiten mover sus extremidades en 3 grados de libertad. Se mueve con un "andar gateando". Puede que sea lento, pero es uno de los más fluidos.
Primero es necesario enseñar al robot a moverse hacia adelante, atrás, izquierda y derecha, luego agregar un sensor ultrasónico que ayudará a detectar obstáculos/obstáculos, y luego un módulo Bluetooth, gracias al cual el control del robot alcanzará un nuevo nivel.
Paso 2: Piezas necesarias

Esqueleto fabricado en plexiglás de 2 mm de espesor.
La parte electrónica del producto casero estará compuesta por:

- 12 servos;
- arduino nano (se puede sustituir por cualquier otra placa arduino);

- Escudo para controlar servos;
- fuente de alimentación (en el proyecto se utilizó una fuente de alimentación de 5V 4A);

- sensor ultrasónico;
- módulo bluetooth hc 05;
Para hacer un escudo necesitarás:

- placa de circuito (preferiblemente con líneas comunes (buses) de alimentación y tierra);
- conectores de clavijas entre placas - 30 piezas;
- enchufes por placa – 36 piezas;

- cables.
Herramientas:
- Cortador láser (o manos expertas);
- superpegamento;
- Adhesivo termofusible.
Paso 3: esqueleto

Usemos un programa de gráficos para dibujar los componentes del esqueleto.
Después de eso, cortamos 30 partes del futuro robot utilizando cualquier método disponible.
Paso 4: montaje

Después de cortar, retire la cubierta protectora de papel del plexiglás.

A continuación comenzamos a montar las patas. Elementos de fijación integrados en partes del esqueleto. Todo lo que queda por hacer es conectar las piezas entre sí. La conexión es bastante firme, pero para mayor confiabilidad, puede aplicar una gota de superpegamento a los sujetadores.

Luego necesitas modificar los servos (pegar un tornillo opuesto a los ejes de los servos).

Con esta modificación conseguiremos que el robot sea más estable. Sólo es necesario modificar 8 servos; los 4 restantes se conectarán directamente al cuerpo.

Adjuntamos las patas al elemento de conexión (parte curva) y este, a su vez, al servoaccionamiento del cuerpo.
Paso 5: hacer el escudo

Hacer el tablero es bastante sencillo si sigues las fotografías que se presentan en el paso.


Paso 6: Electrónica

Conectemos los pines del servoaccionamiento a la placa arduino. Los pines deben conectarse en la secuencia correcta; de lo contrario, ¡nada funcionará!


Paso 7: Programación

Es hora de darle vida a Frankenstein. Primero, carguemos el programa Legs_init y asegurémonos de que el robot esté en la posición que se muestra en la imagen. A continuación, carguemos quattro_test para comprobar si el robot responde a movimientos básicos, como avanzar, retroceder, izquierda y derecha.

IMPORTANTE: Debe agregar una biblioteca adicional al IDE de arduino. El enlace a la biblioteca se proporciona a continuación:
El robot debe dar 5 pasos hacia adelante, 5 pasos hacia atrás, girar 90 grados a la izquierda y 90 grados a la derecha. Si Frankenstein hace todo bien, vamos en la dirección correcta.

PAG. S: Coloque el robot sobre la taza, como sobre un soporte, para no tener que colocarlo en el punto original cada vez. Una vez que las pruebas hayan demostrado que el robot funciona con normalidad, podemos continuar con las pruebas colocándolo en el suelo.
Paso 8: cinemática inversa

La cinemática inversa es lo que realmente impulsa al robot (si no está interesado en el lado matemático de este proyecto y tiene prisa por terminarlo, puede omitir este paso, pero siempre será útil saber qué impulsa al robot).

En palabras simples, la cinemática inversa, o cinemática inversa para abreviar, es la "parte" de las ecuaciones trigonométricas que determinan la posición del extremo afilado de la pata, el ángulo de cada servo, etc., que finalmente determinan un par de ajustes preliminares. . Por ejemplo, la longitud de cada paso del robot o la altura a la que se ubicará el cuerpo durante el movimiento/reposo. Usando estos parámetros predefinidos, el sistema extraerá la cantidad que se debe mover cada servo para controlar el robot usando los comandos dados.
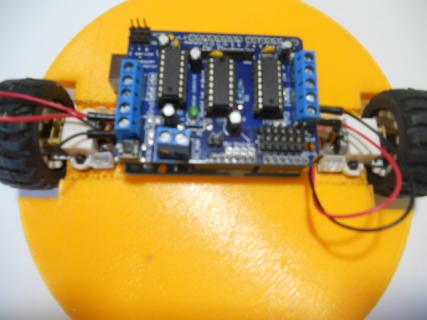
Kit robótico Coche robot de dos ruedas
Kit robótico Robo Car de dos ruedas: un kit para ensamblar un robot basado en un controlador Arduino. El kit contiene todo lo necesario para montar y programar el robot sin utilizar soldador.
La plataforma principal hecha de (acrílico transparente con papel protector) que mide -------x------ mm está diseñada para montar en ella el chasis, el microcontrolador, los sensores y el paquete de baterías.
El chasis del robot, que consta de 2 ruedas motrices (un motor de engranajes de plástico con una rueda sobre un neumático de goma) y una rueda trasera sobre un rodamiento de bolas, que gira libremente 360 grados, permite al robot cambiar libre y rápidamente la dirección del movimiento. 

La tensión de alimentación de los motorreductores de plástico es de 3-6 V. Cuando se alimentan con 5 V, los motorreductores proporcionan un par de 0,9 kgf*cm, la velocidad en el eje de salida de la caja de cambios es de 200 rpm, lo que, con un diámetro de rueda de 65 mm, permite que el robot acelere a una velocidad de 0,5 m/seg.
El kit incluye ruedas para sensores ópticos, que permitirán, con la adición de los sensores adecuados, medir la velocidad de movimiento, así como utilizar datos sobre el movimiento de los accionamientos para estimar el movimiento del robot (odometría).

En la parte superior de la plataforma hay un soporte para baterías 4AA que proporciona energía de 6 V a todos los dispositivos electrónicos. 
La placa Arduino UNO es el cerebro de nuestro robot, montada encima de la plataforma.

Para controlar los motores se utiliza el controlador de motor L298, que permite controlar dos motores DC con un consumo de corriente de hasta 2 Amperios.

Conectando las entradas ENA y ENB a las salidas PWM del Arduino podremos ajustar la velocidad de rotación de cada motor, lo que permitirá que el robot realice giros.
El módulo de distancia ultrasónico HC-SR04 está diseñado para detectar obstáculos en el camino del robot.

Rango de medición de distancia del módulo 2-400 cm s
resolución 0,3 cm, ángulo efectivo<15°. Результат обнаружения не зависит от цвета или отражающей способностью объекта в оптическом диапазоне. Однако, обнаружение мягких материалов, таких как ткань, может быть затруднено.
Para medir distancias en diferentes direcciones, el módulo HC SR-04 debe girarse en círculo. Para la rotación se utiliza un servoaccionamiento SG90 y una plataforma móvil para su montaje. 

Aquí está la plataforma para montar el conjunto del servo. De esta forma está atornillado a la plataforma principal.


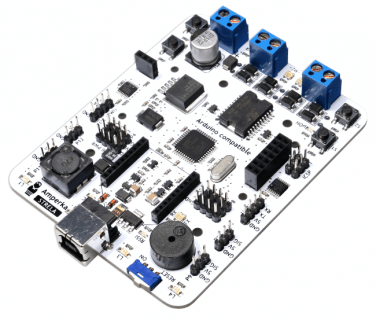
El kit incluye la placa Arduino Sensor Shield V5.0, que está diseñada para ampliar la funcionalidad de los controladores en la plataforma Arduino UNO.
La placa le permite conectar varias variaciones de dispositivos externos, como sensores, servos, relés, botones, potenciómetros, etc. La placa contiene muchas interfaces para conectar varios dispositivos externos y alimentación. Para este robot nos interesa:
Para conectar HC SR-04- Interfaz ultrasónica (interfaz para conectar sensores ultrasónicos): tiene 4 pines, el primer pin está marcado en la placa con un signo "+". Designaciones de pines: VCC, A0, A1, GND.
Para conectar servoaccionamiento y controlador de motor- Los puertos IO digitales (bloque de entrada-salida digital) tienen 16 pines. Designaciones de pines: D0, D1, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, D13, GND, AREF. Cada entrada-salida dispone de 3 contactos GND, VCC, Señal.
Después de ensamblar el robot, puedes comenzar a programar.
Escribamos un boceto simple del movimiento del robot; cuando se detectan obstáculos, el robot se detiene, retrocede, comienza a girar hasta encontrar una dirección libre y avanza nuevamente.
Para escribir un boceto, necesitaremos bibliotecas (descargables para trabajar con el módulo HC SR-04) y Servo (biblioteca estándar de Arduino).
Aquí está el código para este boceto.
// agregar bibliotecas
#incluir "Ultrasónico.h"
#incluir "Servo.h"
//Conexión HC SR-04
// Disparo - A0, Eco - A1
Ultrasónico ultrasónico (A0, A1);
// controlador L298
int MotorDerecha1 = 5;
int MotorDerecha2 = 4;
int VelocidadDerecha = 3;
int MotorIzquierdo1 = 8;
int MotorIzquierdo2 = 7;
int VelocidadIzquierda = 6;
Flotador dist_cm; // variable para almacenar la distancia
bandera booleana;
Configuración nula() (
// configurar salidas para motores en SALIDA
pinMode(VelocidadDerecha, SALIDA);
pinMode(MotorDerecho11, SALIDA);
pinMode(MotorDerecho2, SALIDA);
pinMode(VelocidadIzquierda, SALIDA);
pinMode(MotorLeft1, SALIDA);
pinMode(MotorLeft2, SALIDA);
// adelante
robot_forward();
}
Bucle vacío() (
// obtener datos del HC SR-04
si(dist_cm<20)
{
parada_robot();
bandera = falso;
mientras (bandera == falso)
{
rotación_robot();
dist_cm = ultrasonic.Ranging(CM);
si(dist_cm>50)
bandera = verdadero;
retraso(100);
}
robot_forward();
}
}
// avanzar
vacío robot_forward() (
escritura digital (MotorDerecho1, ALTO);
escritura analógica(VelocidadDerecha,127);
escritura analógica(VelocidadIzquierda,127);
}
// retroceder
vacío robot_forward() (
escritura digital (MotorLeft2, ALTA);
escritura analógica(VelocidadDerecha,127);
escritura analógica(VelocidadIzquierda,127);
retraso(1000);
}
//detener el robot
vacío robot_stop() (
escritura digital (MotorDerecha1,BAJO);
escritura digital (MotorDerecha2,BAJO);
escritura digital (MotorLeft1, BAJO);
escritura digital (MotorLeft2, BAJO);
}
// rotación del robot
void robot_rotation() (
escritura digital (MotorDerecha2, ALTO);
escritura digital (MotorDerecha1,BAJO);
escritura digital (MotorLeft2, BAJO);
escritura digital (MotorLeft1, ALTA);
escritura analógica(VelocidadDerecha,64);
escritura analógica(VelocidadIzquierda,64);
retraso(200);
}

Diagrama de montaje del chasis.
Descripción del set robótico "Coche robot de dos ruedas"



