¿Qué es un motor de corriente continua? ¿Qué es un motor CC sin escobillas y su principio de funcionamiento?
motores de corriente continua Diseñado para convertir la energía de corriente continua en trabajo mecánico.
Los motores de CC son mucho menos comunes que los motores de CA. Esto se debe principalmente al alto costo comparativo, al dispositivo más complejo y a las dificultades para suministrar energía. Pero a pesar de todas estas desventajas, DBT tiene muchas ventajas. Por ejemplo, los motores de CA son difíciles de regular, pero los DFC se regulan perfectamente de diversas formas. Además, los DFC tienen características mecánicas más rígidas y pueden proporcionar un par de arranque elevado.
Los motores eléctricos de CC se utilizan como motores de tracción, en el transporte eléctrico y como diversos actuadores.
Diseño de motores DC.
El diseño de un motor de CC es similar al de un motor de CA, pero aún existen diferencias significativas. En el marco 7, que está hecho de acero, se instala un devanado de excitación en forma de bobinas 6. Entre los polos principales, se pueden instalar polos adicionales 5 para mejorar las propiedades del DFC. En el interior se instala una armadura 4, que consta de un núcleo y un colector 2, y se instala mediante cojinetes 1 en la carcasa del motor. El conmutador es una diferencia significativa con respecto a los motores de CA. Está conectado a las escobillas 3, lo que permite suministrar o, por el contrario, eliminar tensión del circuito del inducido en los generadores.
Principio de funcionamiento

El principio de funcionamiento del DPT se basa en la interacción de los campos magnéticos del devanado de excitación y la armadura. Puedes imaginar que en lugar de una armadura tenemos un marco a través del cual fluye la corriente, y en lugar de un devanado de excitación, un imán permanente con polos N y S. Cuando la corriente continua fluye a través del marco, el campo magnético del imán permanente comienza a actúa sobre él, es decir, el marco comienza a girar y, dado que la dirección de la corriente no cambia, la dirección de rotación del marco sigue siendo la misma.
Cuando se aplica voltaje a los terminales del motor, la corriente comienza a fluir en el devanado del inducido y, como ya sabemos, el campo magnético de la máquina comienza a actuar sobre él, mientras que el inducido comienza a girar, y dado que el inducido gira en En el campo magnético, comienza a formarse un EMF. Este CEM está dirigido contra la corriente, por eso se le llama CEM de regreso. Se puede encontrar usando la fórmula
Donde Ф es el flujo magnético de excitación, n es la frecuencia de rotación y Ce es el momento de diseño de la máquina, que permanece constante para ella.
El voltaje en los terminales es mayor que la EMF trasera por el valor de la caída de voltaje en el circuito del inducido.
![]()
Y si multiplicamos esta expresión por la corriente, obtenemos la ecuación del balance de potencia.
![]()
Independientemente del diseño, cualquier motor eléctrico está diseñado de la misma manera: dentro de una ranura cilíndrica en un devanado estacionario (estator), gira un rotor, en el que se excita un campo magnético que provoca la repulsión de sus polos del estator.
Mantener una repulsión constante requiere una nueva conmutación de los devanados del rotor, como se hace en los motores eléctricos con escobillas, o la creación de un campo magnético giratorio en el propio estator (un ejemplo clásico es un motor trifásico asíncrono).
Tipos de motores eléctricos y sus características.
La eficiencia y confiabilidad de los equipos dependen directamente del motor eléctrico, por lo que su selección requiere un enfoque serio.
Mediante un motor eléctrico la energía eléctrica se convierte en energía mecánica. La potencia, las revoluciones por minuto, el voltaje y el tipo de alimentación son los principales indicadores de los motores eléctricos. Además, los indicadores de peso, tamaño y energía son de gran importancia.
Los motores eléctricos tienen grandes ventajas. Así, en comparación con los motores térmicos de potencia comparable, los motores eléctricos tienen un tamaño mucho más compacto. Son perfectos para su instalación en áreas pequeñas, por ejemplo en equipamientos de tranvías, locomotoras eléctricas y máquinas herramienta para diversos fines.
Al utilizarlos no se libera vapor ni productos de descomposición, lo que garantiza el respeto al medio ambiente. Los motores eléctricos se dividen en motores de CC y CA, motores paso a paso, servomotores y motores lineales.
Los motores eléctricos de CA, a su vez, se dividen en síncronos y asíncronos.
- motores de corriente continua
Se utilizan para crear accionamientos eléctricos ajustables con altos indicadores dinámicos y de rendimiento. Estos indicadores incluyen una alta uniformidad de rotación y capacidad de recarga. Se utilizan para completar máquinas de fabricación de papel, teñido y acabado y manipulación de materiales, para equipos de polímeros, plataformas de perforación y unidades auxiliares de excavadoras. Se suelen utilizar para equipar todo tipo de vehículos eléctricos.
Tienen mayor demanda que los motores de CC. Se utilizan a menudo en la vida cotidiana y en la industria. Su producción es mucho más económica, el diseño es más sencillo y fiable y el funcionamiento es bastante sencillo. Casi todos los electrodomésticos están equipados con motores de CA. Se utilizan en lavadoras, campanas de cocina, etc. En las grandes industrias se utilizan para accionar máquinas herramienta, cabrestantes para mover cargas pesadas, compresores, bombas hidráulicas y neumáticas y ventiladores industriales.- motores paso a paso
Funcionan según el principio de convertir impulsos eléctricos en movimientos mecánicos de naturaleza discreta. La mayoría de los equipos informáticos y de oficina están equipados con ellos. Estos motores son muy pequeños pero muy productivos. A veces tienen demanda en determinadas industrias. - Servomotores
Se refiere a motores de corriente continua. Son de alta tecnología. Su trabajo se lleva a cabo mediante el uso de retroalimentación negativa. Un motor de este tipo es especialmente potente y es capaz de desarrollar una velocidad de rotación del eje elevada, que se regula mediante un software. Esta función la hace popular en el equipamiento de líneas de producción y en máquinas industriales modernas. - Motores lineales
Tienen la capacidad única de realizar movimientos rectilíneos del rotor y el estator entre sí. Dichos motores son indispensables para el funcionamiento de mecanismos cuyo funcionamiento se basa en el movimiento hacia adelante y alternativo de los cuerpos de trabajo. El uso de un motor eléctrico lineal permite aumentar la confiabilidad y eficiencia del mecanismo debido a que simplifica significativamente su funcionamiento y elimina casi por completo la transmisión mecánica. - Motores sincrónicos
Son un tipo de motores eléctricos de CA. La frecuencia de rotación de su rotor es igual a la frecuencia de rotación del campo magnético en el entrehierro. Se utilizan para compresores, grandes ventiladores, bombas y generadores de CC, ya que funcionan a velocidad constante. - motores asíncronos
Además, pertenecen a la categoría de motores eléctricos de CA. La velocidad de rotación de su rotor difiere de la frecuencia de rotación del campo magnético creado por la corriente en el devanado del estator. Los motores asíncronos se dividen en dos tipos, según el diseño del rotor: de jaula de ardilla y de rotor bobinado. El diseño del estator es el mismo en ambos tipos, la única diferencia está en el devanado.
Los motores eléctricos son indispensables en el mundo moderno. Gracias a ellos, el trabajo de las personas se facilita enormemente. Su uso ayuda a reducir el coste de la energía humana y a hacer la vida cotidiana mucho más cómoda.
Designación de serie del motor:
- AIR, A, 4A, 5A, AD, 7АVER - motores eléctricos industriales generales con ajuste de potencia según GOST 51689-2000
- AIS, 6A, IMM, RA, AIS - motores eléctricos industriales generales con enlace de potencia según la norma europea DIN (CENELEC)
- AIM, AIML, 4VR, VA, AV, VAO2, 1VAO, 3V - motores eléctricos a prueba de explosiones
- AIU, VRP, AVR, 3AVR, VR: motores eléctricos para minería a prueba de explosiones
- A4, DAZO4, AOM, DAV, AO4 - motores eléctricos de alto voltaje
Signo de modificación del motor eléctrico:
- M - motor eléctrico modernizado (por ejemplo: ADM63A2U3)
- K - motor eléctrico con rotor bobinado (por ejemplo: 5ANK280A6)
- X - motor eléctrico con estructura de aluminio (por ejemplo: 5AMH180M2U3)
- E - motor eléctrico monofásico 220V (por ejemplo: AIRE80S2U3)
- N - motor eléctrico protegido con autoventilación (por ejemplo: 5AN200M2U3)
- F - motor eléctrico protegido con refrigeración forzada (por ejemplo: 5AF180M2U3)
- C - motor eléctrico con mayor deslizamiento (por ejemplo: AIRS180M4U3)
- B - motor eléctrico incorporado (por ejemplo: ADMV63V2U3)
- R - motor eléctrico con par de arranque aumentado (por ejemplo: AIRR180S4U3)
- P - motor eléctrico para accionar ventiladores en granjas avícolas (“gallinero”) (por ejemplo: AIRP80A6U2)
El diseño climático generalmente aceptado GOST se aplica a todo tipo de máquinas, instrumentos, motores eléctricos y otros productos técnicos. A continuación se proporciona una explicación completa de la designación.
La letra indica la zona climática.
- U - clima templado;
- T—clima tropical;
- CL - clima frío;
- M—clima marino moderado-frío;
- О - versión climática general (excepto mar);
- OM - versión marina climática general;
- B - versión para todo clima.
- 1 - al aire libre;
- 2 - bajo un dosel o en interiores, donde las condiciones sean las mismas que en el exterior, con excepción de la radiación solar;
- 3 - en interiores sin regulación artificial de las condiciones climáticas;
- 4 - interior con regulación artificial de las condiciones climáticas (ventilación, calefacción);
- 5 - en habitaciones con mucha humedad, sin regulación artificial de las condiciones climáticas.
Según el tipo de funcionamiento, estos motores se dividen en:
- motores sincrónicos;
- motores asíncronos;.
Según el número de fases, los motores son:
- monofásico
- bifásico
- trifásico
La diferencia fundamental es que en las máquinas síncronas el primer armónico de la fuerza magnetomotriz del estator se mueve con la velocidad de rotación del rotor (es por eso que el propio rotor gira a la velocidad de rotación del campo magnético en el estator), mientras que en las asíncronas En las máquinas existe y sigue habiendo una diferencia entre la velocidad de rotación del rotor y la velocidad de rotación del campo magnético en el estator (el campo gira más rápido que el rotor).
El rotor de dicho motor eléctrico es un cilindro de metal, en cuyas ranuras se presionan o vierten conductores conductores en ángulo con respecto al eje de rotación, y en los extremos del rotor están unidos mediante anillos en un todo. El campo magnético alterno del estator excita una contracorriente en el rotor, que se asemeja a una rueda de ardilla y, en consecuencia, un campo magnético que lo repele del estator.
Dependiendo del número de devanados del estator, un motor asíncrono puede ser:
- Monofásico- En este caso, la principal desventaja del motor es la imposibilidad de arrancar por sí solo, ya que el vector de la fuerza de repulsión pasa estrictamente por el eje de rotación. Para comenzar a funcionar, el motor requiere un empujón de arranque o la inclusión de un devanado de arranque separado, lo que crea un momento de fuerza adicional que desplaza su vector total con respecto al eje del inducido.
- Motor eléctrico bifásico tiene dos devanados en los que las fases se desplazan en un ángulo correspondiente al ángulo geométrico entre los devanados. En este caso, en el motor eléctrico se crea el llamado campo magnético giratorio (la disminución de la intensidad del campo en los polos de un devanado se produce sincrónicamente con su aumento en el otro). Un motor de este tipo es capaz de arrancar por sí solo, pero tiene dificultades para dar marcha atrás. Dado que el suministro de energía moderno no utiliza redes bifásicas, los motores eléctricos de este tipo se utilizan en redes monofásicas con la segunda fase conectada a través de un elemento desfasador (normalmente un condensador).
- Motor eléctrico asíncrono trifásico.- el tipo más avanzado de motor asíncrono, ya que es posible invertirlo fácilmente - cambiar el orden de conmutación de los devanados de fase cambia la dirección de rotación del campo magnético y, en consecuencia, del rotor.
Los motores de conmutador de CA se utilizan en los casos en que se requieren altas velocidades de rotación (los motores eléctricos asíncronos no pueden exceder la velocidad de rotación del flujo magnético en el estator; para una red industrial de 50 Hz, esto es 3000 rpm). Además, se benefician en el par de arranque (aquí es proporcional a la corriente, no a las revoluciones) y tienen una menor corriente de arranque, sobrecargando menos la red eléctrica durante el arranque. También facilitan el control de la velocidad.
La desventaja de estas ventajas es el elevado coste (requiere la fabricación de un rotor con un núcleo apilado, varios devanados y un colector, que además es más difícil de equilibrar) y una vida útil más corta. Además de la necesidad de reemplazar periódicamente las escobillas desgastadas, el propio conmutador se desgasta con el tiempo.
Un motor eléctrico síncrono tiene la particularidad de que el campo magnético del rotor no es inducido por el campo magnético del estator, sino por su propio devanado conectado a una fuente de corriente continua independiente. Debido a esto, su frecuencia de rotación es igual a la frecuencia de rotación del campo magnético del estator, de donde proviene el término “síncrono”.
Al igual que un motor de CC, un motor síncrono de CA es reversible: cuando se aplica voltaje al estator, funciona como un motor eléctrico; cuando se gira desde una fuente externa, él mismo comienza a excitar corriente alterna en los devanados de fase; El principal ámbito de uso de los motores eléctricos síncronos son los accionamientos de alta potencia. En este caso, un aumento de la eficiencia en relación con los motores eléctricos asíncronos significa una reducción significativa de las pérdidas de electricidad.
Los motores síncronos también se utilizan en vehículos eléctricos. Sin embargo, para controlar la velocidad en este caso, se necesitan potentes convertidores de frecuencia, pero durante el frenado se puede devolver energía a la red.

Dado que la corriente continua no es capaz de crear un campo magnético cambiante, garantizar la rotación continua del rotor requiere una reconmutación forzada de los devanados o un cambio discreto en la dirección del campo magnético.
El método más antiguo conocido es el uso de un conmutador electromecánico. En este caso, el inducido del motor eléctrico tiene varios devanados multidireccionales conectados a las láminas del conmutador ubicadas en la posición adecuada con respecto a las escobillas. En el momento en que se enciende la alimentación, se produce un pulso en el devanado conectado a las escobillas, después de lo cual el rotor gira y se enciende un nuevo devanado en el mismo lugar con respecto a los polos del estator.
Dado que la magnetización del estator no cambia durante el funcionamiento de un motor con conmutador de CC, se pueden utilizar potentes imanes permanentes en lugar de un núcleo con devanados, lo que hará que el motor sea más compacto y ligero.
Estos motores con conjunto de escobillas-conmutador son:
- Coleccionista- un dispositivo eléctrico en el que el sensor de posición del rotor y el interruptor de corriente en los devanados son el mismo dispositivo - una unidad colectora de escobillas.
- Sin escobillas- un sistema electromecánico cerrado que consta de un dispositivo síncrono con distribución sinusoidal del campo magnético en el espacio, un sensor de posición del rotor, un convertidor de coordenadas y un amplificador de potencia. Una opción más cara en comparación con los motores con escobillas.
El motor con conmutador no está exento de una serie de desventajas. Este:
- alto nivel de interferencia, tanto transmitida a la red de suministro al cambiar los devanados del inducido como excitada por las chispas de las escobillas;
- desgaste inevitable del conmutador y de las escobillas;
- aumento de ruido durante el funcionamiento.
La electrónica de potencia moderna ha permitido eliminar estas deficiencias mediante el uso del llamado motor paso a paso: en él, el rotor tiene una magnetización permanente y un dispositivo externo cambia secuencialmente la dirección de la corriente en varios devanados del estator. De hecho, para un solo pulso de corriente, el rotor gira en un ángulo fijo (paso), de ahí el nombre de los motores eléctricos de este tipo.
Los motores paso a paso son silenciosos y también le permiten ajustar tanto el par (amplitud del pulso) como la velocidad (frecuencia) dentro del rango más amplio, y también se pueden revertir fácilmente cambiando el orden de las señales. Por esta razón, se utilizan ampliamente en servos y automatización, pero su potencia máxima está determinada por las capacidades del circuito de control de potencia, sin el cual los motores paso a paso no funcionan.
Motor eléctrico asíncrono monofásico.
El dispositivo es un motor eléctrico asíncrono en el que el estator tiene un solo devanado de trabajo. El equipo está destinado a la conexión a una red de corriente alterna monofásica. La unidad se utiliza para completar sistemas de accionamiento de electrodomésticos industriales y domésticos de pequeña potencia: bombas, máquinas herramienta, trituradoras, exprimidores, picadoras de carne, ventiladores, compresores, etc.
Ventajas de este equipo:
- diseño sencillo;
- consumo económico de electricidad;
- versatilidad (el motor eléctrico monofásico se utiliza en muchas áreas industriales);
- nivel aceptable de vibración y ruido durante la operación;
- mayor vida útil;
- Resistencia a diversos tipos de sobrecargas.
Una ventaja separada de los motores eléctricos monofásicos de estos fabricantes es la capacidad de conectar la unidad a una red de 220 voltios. Gracias a esto, el dispositivo se puede utilizar no sólo en la producción, sino también para resolver los problemas cotidianos del hogar. Los motores eléctricos asíncronos monofásicos presentados son fáciles de conectar y no requieren mantenimiento especial.
Motor eléctrico asíncrono trifásico.
La unidad es un motor de CA asíncrono que consta de un rotor y un estator con tres devanados. El dispositivo está diseñado para conectarse a una red de corriente alterna trifásica. Este motor eléctrico asíncrono ha encontrado una amplia aplicación en la industria: a menudo se utiliza para completar equipos potentes como compresores, trituradoras, molinos y centrífugas. Además, la unidad forma parte del diseño de muchos dispositivos de automatización y telemecánica, dispositivos médicos, así como de diversas máquinas y sierras destinadas a su uso en el hogar.
Entre las ventajas de los dispositivos presentados cabe destacar:
- altos niveles de eficiencia y productividad;
- versatilidad (el motor eléctrico asíncrono trifásico se utiliza en diversos campos de actividad);
- bajo nivel de vibración y ruido durante el funcionamiento;
- cuerpo liviano, pero al mismo tiempo confiable y resistente al desgaste;
- cumplimiento de estrictos requisitos de las normas de calidad europeas.
Además, los motores eléctricos asíncronos trifásicos se caracterizan por su facilidad de instalación y su larga vida útil. Vale la pena señalar que en los modelos de algunos fabricantes es posible instalar módulos adicionales a pedido del cliente. Por ejemplo, los motores eléctricos trifásicos de la serie BN pueden equiparse con un sistema de refrigeración forzada, que garantiza un funcionamiento adecuado y eficiente de la unidad a bajas velocidades.
mirprivoda.ru, eltechbook.ru
La primera de todas las máquinas eléctricas rotativas inventada en el siglo XIX fue el motor de corriente continua. Su principio de funcionamiento se conoce desde mediados del siglo pasado y, hasta el día de hoy, los motores de corriente continua (DCM) continúan sirviendo fielmente a las personas, impulsando muchas máquinas y mecanismos útiles.
El primer DBT
Desde los años 30 del siglo XIX han pasado por varias etapas en su desarrollo. El caso es que antes de la aparición de las máquinas a finales del siglo pasado, la única fuente de electricidad era una pila galvánica. Por lo tanto, todos los primeros motores eléctricos sólo podían funcionar con corriente continua.
¿Cuál fue el primer motor de corriente continua? El principio de funcionamiento y el diseño de los motores construidos en la primera mitad del siglo XIX fueron los siguientes. Un inductor de polo saliente era un conjunto de imanes permanentes fijos o electroimanes de varilla que no tenían un circuito magnético cerrado común. La armadura del polo saliente estaba formada por varios electroimanes de varilla separados en un eje común, impulsados a rotación por fuerzas de repulsión y atracción hacia los polos del inductor. Sus representantes típicos fueron los motores de U. Ricci (1833) y B. Jacobi (1834), equipados con conmutadores de corriente mecánicos en electroimanes de armadura con contactos móviles en el circuito de devanado de la armadura.
Cómo funcionaba el motor Jacobi
¿Cuál era el principio de funcionamiento de esta máquina? El motor Jacobi DC y sus análogos tenían un par electromagnético pulsante. Durante el tiempo de aproximación de los polos opuestos de la armadura y el inductor bajo la influencia de la fuerza de atracción magnética, el par del motor alcanzó rápidamente su máximo. Luego, cuando los polos de la armadura estaban ubicados frente a los polos del inductor, un conmutador mecánico interrumpía la corriente en los electroimanes de la armadura. El momento cayó a cero. Debido a la inercia de la armadura y el mecanismo accionado, los polos de la armadura salieron de debajo de los polos del inductor, en este momento se les suministró una corriente de dirección opuesta desde el conmutador, su polaridad también cambió a la opuesto, y la fuerza de atracción hacia el polo más cercano del inductor fue reemplazada por una fuerza repulsiva. Así, el motor Jacobi giraba en sucesivos empujes.
Aparece un ancla de anillo
En los electroimanes de varilla de inducido del motor Jacobi, la corriente se cortaba periódicamente, el campo magnético que creaban desaparecía y su energía se convertía en pérdidas de calor en los devanados. Así, la conversión electromecánica de la electricidad procedente de la fuente de corriente del inducido (celda galvánica) en energía mecánica se produjo de forma intermitente. Lo que se necesitaba era un motor con un devanado cerrado continuo, en el que la corriente fluyera constantemente durante todo su funcionamiento.
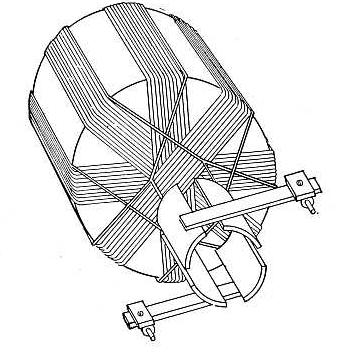
Y tal fuhtufn fue creado en 1860 por A. Pacinotti. ¿En qué se diferenciaba su motor de CC de sus predecesores? El principio de funcionamiento y el diseño del motor Pacinotti son los siguientes. Como ancla utilizó un anillo de acero con radios montados sobre un eje vertical. Al mismo tiempo, el ancla no tenía postes claramente definidos. Ha dejado de ser prominente.
Entre los radios del anillo se enrollaron bobinas del devanado del inducido, cuyos extremos se conectaron en serie al propio inducido, y desde los puntos de conexión de cada dos bobinas se hicieron grifos, unidos a las placas colectoras ubicadas a lo largo del círculo en la parte inferior del eje del motor, cuyo número era igual al número de bobinas. Todo el devanado del inducido se cerró sobre sí mismo y los sucesivos puntos de conexión de sus bobinas se unieron a placas colectoras adyacentes, a lo largo de las cuales se deslizaban un par de rodillos portadores de corriente.
La armadura del anillo se colocó entre los polos de dos electroimanes estacionarios del inductor-estator, de modo que las líneas de fuerza del campo magnético de excitación creado por ellos ingresaron a la superficie cilíndrica exterior de la armadura del motor debajo del polo norte de excitación, pasando a lo largo del anillo. armadura sin moverse hacia su agujero interno, y salió por debajo del polo sur.

Cómo funcionaba el motor de Pacinotti
¿Cuál fue su principio de funcionamiento? El motor CC de Pacinotti funcionaba exactamente igual que los motores CC modernos.
En el campo magnético de un polo de inductor con una polaridad determinada, siempre había un cierto número de conductores de devanado de inducido con una corriente de dirección constante, y la dirección de la corriente de inducido bajo diferentes polos del inductor era opuesta. Esto se logró colocando rodillos portadores de corriente, que actuaban como cepillos, en el espacio entre los polos del inductor. Por lo tanto, la corriente instantánea del inducido fluyó hacia el devanado a través del rodillo, la placa colectora y el grifo conectado a él, que también estaba ubicado en el espacio entre los polos, luego fluyó en direcciones opuestas a lo largo de las dos ramas del medio devanado, y finalmente fluía a través del grifo, la placa colectora y el rodillo en el otro polo intermedio. Al mismo tiempo, las bobinas del inducido debajo de los polos del inductor cambiaron, pero permanecieron sin cambios.
Cada conductor de la bobina del inducido con corriente, ubicado en el campo magnético del polo inductor, fue influenciado por una fuerza, cuya dirección está determinada por la conocida regla de la "mano izquierda". En relación con el eje del motor, esta fuerza creó un par, y la suma de los momentos de todas esas fuerzas da el par total del DMF, que es casi constante incluso con varias placas colectoras.
DPT con armadura de anillo y bobinado de Gram
Como ha sucedido a menudo en la historia de la ciencia y la tecnología, el invento de A. Pacinotti no encontró aplicación. Fue olvidado durante 10 años, hasta que en 1870 el inventor franco-alemán Z. Gramm lo repitió de forma independiente en un diseño similar. En estas máquinas, el eje de rotación ya era horizontal, se usaban escobillas de carbón que se deslizaban a lo largo de las placas del conmutador. Un diseño casi moderno. En los años 70 del siglo XIX, el principio de reversibilidad de las máquinas eléctricas ya se había hecho bien conocido y la máquina de Gram se utilizaba como generador y motor de corriente continua. Su principio de funcionamiento ya se ha descrito anteriormente.
A pesar de que la invención de la armadura anular fue un paso importante en el desarrollo del DPT, su bobinado (llamado bobinado de Gram) tenía un inconveniente importante. En el campo magnético de los polos del inductor solo estaban los de sus conductores (llamados activos) que se encontraban debajo de estos polos en la superficie cilíndrica exterior de la armadura. Fue a ellos a quienes se les aplicaron los magnéticos, creando un par con respecto al eje del motor. Los mismos conductores inactivos que pasaron por el orificio de la armadura del anillo no participaron en la creación del momento. Sólo disipaban inútilmente la electricidad en forma de pérdidas de calor.

De la armadura anular a la armadura de tambor
El famoso ingeniero eléctrico alemán F. Geffner-Alteneck logró eliminar este inconveniente de la armadura anular en 1873. ¿Cómo funcionó su motor DC? El principio de funcionamiento y el diseño de su inductor-estator son los mismos que los de un motor con devanado anular. Pero el diseño de la armadura y su devanado han cambiado.
Gefner-Altenek notó que la dirección de la corriente de armadura que fluye desde las escobillas estacionarias en los conductores del devanado de Gram debajo de los polos de excitación adyacentes es siempre opuesta, es decir se pueden incluir en las espiras de una bobina ubicada en la superficie cilíndrica exterior con un ancho (paso) igual a la división de los polos (parte de la circunferencia del inducido por un polo de excitación).
En este caso, el orificio en la armadura anular se vuelve innecesario y se convierte en un cilindro macizo (tambor). Este devanado y la propia armadura se denominan devanados de tambor. El consumo de cobre en él con el mismo número de conductores activos es mucho menor que en el devanado de Gram.
El ancla se vuelve irregular
En las máquinas de Gram y Gefner-Altenek, la superficie de la armadura era lisa y los conductores de su devanado estaban ubicados en el espacio entre ésta y los polos del inductor. En este caso, la distancia entre la superficie cilíndrica cóncava del polo de excitación y la superficie convexa de la armadura alcanzó varios milímetros. Por lo tanto, para crear la magnitud requerida del campo magnético, fue necesario utilizar bobinas de excitación con una gran fuerza magnetomotriz (con una gran cantidad de vueltas). Esto aumentó significativamente el tamaño y el peso de los motores. Además, era difícil fijar las bobinas a la superficie lisa de la armadura. ¿Pero qué podemos hacer? De hecho, para que un conductor actúe sobre un conductor con una corriente de amperios, debe estar ubicado en puntos del espacio con un gran campo magnético (con una gran inducción magnética).
Resultó que esto no es necesario. El inventor estadounidense de la ametralladora, H. Maxim, demostró que si la armadura del tambor está dentada y las bobinas de devanado del tambor se colocan en las ranuras formadas entre los dientes, entonces el espacio entre este y los polos de excitación se puede reducir a fracciones. de un milímetro. Esto hizo posible reducir significativamente el tamaño de las bobinas de excitación, pero el par del motor de CC no disminuyó en absoluto.
¿Cómo funciona un motor de CC de este tipo? El principio de funcionamiento se basa en el hecho de que en una armadura de engranaje, la fuerza magnética no se aplica a los conductores en sus ranuras (prácticamente no hay campo magnético en ellas), sino a los propios dientes. En este caso, la presencia de corriente en el conductor en la ranura es decisiva para que se produzca esta fuerza.
Cómo deshacerse de las corrientes parásitas
Otra mejora importante la realizó el famoso inventor T. Edison. ¿Qué añadió al motor de CC? El principio de funcionamiento no ha cambiado, pero el material del que está hecho su anclaje ha cambiado. En lugar del macizo anterior, se laminó con finas láminas de acero aisladas eléctricamente entre sí. Esto hizo posible reducir la cantidad de corrientes parásitas (corrientes de Foucault) en la armadura, lo que aumentó la eficiencia del motor.

Principio de funcionamiento de un motor de CC.
Brevemente, se puede formular de la siguiente manera: cuando el devanado del inducido de un motor excitado se conecta a una fuente de energía, surge en él una gran corriente, llamada corriente de arranque y que excede varias veces su valor nominal. Además, bajo los polos de excitación de polaridad opuesta, la dirección de las corrientes en los conductores del devanado del inducido también es opuesta, como se muestra en la siguiente figura. Según estos conductores, las fuerzas de Ampere actúan en sentido contrario a las agujas del reloj y arrastran la armadura hacia la rotación. En este caso, se induce una tensión direccional procedente de la fuente de alimentación en los conductores del devanado del inducido. A medida que la armadura se acelera, la contraEMF en su devanado también aumenta. En consecuencia, la corriente del inducido disminuye desde la corriente de arranque hasta un valor correspondiente al punto de funcionamiento en la característica del motor.

Para aumentar la velocidad de rotación de la armadura, es necesario aumentar la corriente en su devanado o reducir la contraEMF en ella. Esto último se puede lograr reduciendo la magnitud del campo magnético de excitación reduciendo la corriente en el devanado de excitación. Este método de controlar la velocidad del DPT se ha generalizado.
Principio de funcionamiento de un motor CC con excitación independiente
Al conectar los terminales del devanado de excitación (OB) a una fuente de alimentación separada (OB independiente), generalmente se fabrican potentes DFC para que sea más conveniente regular el valor de la corriente de excitación (para cambiar la velocidad de rotación). En cuanto a sus propiedades, los DFC con OV independientes son casi similares a los DFC con OV conectados en paralelo al devanado del inducido.
Excitación paralela de DBT
El principio de funcionamiento de un motor CC de excitación en paralelo está determinado por sus características mecánicas, es decir, dependencia de la velocidad de rotación del par de carga en su eje. Para un motor de este tipo, el cambio de velocidad durante la transición del ralentí al par de carga nominal oscila entre el 2 y el 10%. Estas características mecánicas se denominan rígidas.

Por tanto, el principio de funcionamiento de un motor de corriente continua con excitación en paralelo determina su uso en accionamientos con una velocidad de rotación constante en una amplia gama de cambios de carga. Sin embargo, también se usa ampliamente en variadores de velocidad variable. En este caso, para regular su velocidad se puede utilizar un cambio tanto en la corriente del inducido como en la corriente de excitación.
Excitación secuencial de DBT.
El principio de funcionamiento de un motor CC excitado en serie, así como uno en paralelo, está determinado por sus características mecánicas, que en este caso son suaves, porque La velocidad del motor varía significativamente con los cambios de carga. ¿Dónde es más rentable utilizar un motor de CC de este tipo? El principio de funcionamiento del motor de tracción ferroviaria, cuya velocidad debe disminuir cuando el tren supera pendientes y volver a la nominal cuando circula por una llanura, corresponde plenamente a las características de un DFC con un OV conectado en serie con el inducido. devanado. Por lo tanto, una parte importante de las locomotoras eléctricas de todo el mundo están equipadas con este tipo de dispositivos.
El principio de funcionamiento de un motor de CC con excitación en serie también se implementa mediante motores de tracción de corriente pulsante, que son, de hecho, los mismos motores de CC con excitación en serie, pero especialmente diseñados para funcionar con la corriente rectificada que ya está a bordo de la locomotora eléctrica. , que tiene pulsaciones importantes.
El funcionamiento de cualquier motor eléctrico se basa en el principio de inducción electromagnética. Un motor eléctrico consta de una parte estacionaria: un estator (para motores de CA asíncronos y síncronos) o un inductor (para motores de CC) y una parte móvil: un rotor (para motores de CA asíncronos y síncronos) o una armadura (para motores de CC) . Los imanes permanentes se utilizan a menudo como inductores en motores de CC de baja potencia.
Todos los motores, a grandes rasgos, se pueden dividir en dos tipos:
motores de corriente continua
Motores de CA (asíncronos y síncronos)
motores de corriente continua
Según algunas opiniones, este motor también puede denominarse máquina de CC síncrona con autosincronización. Un motor simple, que es una máquina de corriente continua, consta de un imán permanente sobre un inductor (estator), 1 electroimán con polos pronunciados en la armadura (una armadura de dos puntas con polos pronunciados y un devanado), un conjunto de colector de escobillas con 2 placas (laminillas) y 2 cepillos.Un motor simple tiene 2 posiciones de rotor (2 "puntos muertos"), desde las cuales el arranque automático es imposible y un par desigual. En una primera aproximación, el campo magnético de los polos del estator es uniforme (uniforme).

Estos motores con conjunto de escobillas-conmutador son:
Coleccionista- un dispositivo eléctrico en el que el sensor de posición del rotor y el interruptor de corriente en los devanados son el mismo dispositivo - una unidad colectora de escobillas.

Sin escobillas- un sistema electromecánico cerrado que consta de un dispositivo síncrono con distribución sinusoidal del campo magnético en el espacio, un sensor de posición del rotor, un convertidor de coordenadas y un amplificador de potencia. Una opción más cara en comparación con los motores con escobillas.

motores de corriente alterna
Según el tipo de funcionamiento, estos motores se dividen en motores síncronos y asíncronos. La diferencia fundamental es que en las máquinas síncronas el primer armónico de la fuerza magnetomotriz del estator se mueve con la velocidad de rotación del rotor (es por eso que el propio rotor gira a la velocidad de rotación del campo magnético en el estator), mientras que en las asíncronas En las máquinas existe y sigue habiendo una diferencia entre la velocidad de rotación del rotor y la velocidad de rotación del campo magnético en el estator (el campo gira más rápido que el rotor).Sincrónico- un motor de corriente alterna cuyo rotor gira sincrónicamente con el campo magnético de la tensión de alimentación. Estos motores se utilizan tradicionalmente con potencias enormes (cientos de kilovatios o más).
Hay motores síncronos con movimiento angular discreto del rotor: motores paso a paso. En ellos, esta posición del rotor se fija suministrando energía a los correspondientes devanados. La transición a otra posición se logra eliminando el voltaje de suministro de algunos devanados y transfiriéndolo a otros devanados del motor.
Otro tipo de motor síncrono es un motor de reluctancia conmutada, cuya alimentación de energía de cuyos devanados se realiza mediante elementos semiconductores.

Asincrónico- un motor de corriente alterna en el que la velocidad del rotor difiere de la frecuencia del campo magnético de torsión creado por la tensión de alimentación; el segundo nombre para las máquinas asíncronas es inducción debido a que la corriente en el devanado del rotor es inducida por el campo giratorio; del estator. Las máquinas asíncronas constituyen hoy en día una gran parte de las máquinas eléctricas. Se utilizan principalmente en forma de motores eléctricos y se consideran convertidores clave de energía eléctrica en energía mecánica, y se utilizan principalmente motores asíncronos con rotor de jaula de ardilla.
Según el número de fases, los motores son:
- monofásico
- bifásico
- trifásico
Los motores más populares y demandados que se utilizan en la producción y en los hogares:
Motor asíncrono monofásico de jaula de ardilla
Un motor asíncrono monofásico tiene solo 1 devanado de trabajo en el estator, al que se suministra corriente alterna durante el funcionamiento del motor. Aunque para arrancar el motor, también hay un devanado auxiliar en su estator, que se conecta brevemente a la red a través de un condensador o inductancia, o se cortocircuita con los contactos de arranque del interruptor. Esto es necesario para crear un cambio de fase inicial para que el rotor comience a girar; de lo contrario, el campo magnético pulsante del estator no movería el rotor de su lugar.
El rotor de dicho motor, como cualquier otro motor asíncrono con rotor de jaula de ardilla, es un núcleo cilíndrico con ranuras rellenas de aluminio, con palas de ventilación fundidas inmediatamente.
Un rotor de este tipo se denomina rotor de jaula de ardilla. Los motores monofásicos se utilizan en dispositivos de baja potencia, incluidos ventiladores de ambiente o bombas pequeñas.

Motor asíncrono bifásico de jaula de ardilla
Los motores asíncronos bifásicos son más eficientes cuando funcionan desde una red de CA monofásica. Contienen dos devanados de trabajo en el estator, ubicados perpendicularmente, mientras que uno de los devanados está conectado directamente a la red de CA y el segundo a través de un capacitor desfasador, por lo que se libera un campo magnético giratorio, pero sin el capacitor el rotor no moverse.
Estos motores, entre otras cosas, tienen un rotor de jaula de ardilla y su uso es incluso más amplio que el de los motores monofásicos. Ya hay lavadoras y máquinas varias. Los motores bifásicos para el suministro de energía desde redes monofásicas se denominan motores de condensador, porque a menudo se considera que un condensador desfasador es una parte esencial de ellos.

Motor asíncrono trifásico de jaula de ardilla
Un motor asíncrono trifásico tiene tres devanados de trabajo en el estator, desplazados entre sí de modo que cuando se conecta a una red trifásica, sus campos magnéticos se desplazan en el espacio entre sí 120 grados. Cuando se conecta un motor trifásico a una red de CA trifásica, aparece un campo magnético giratorio que hace que el rotor de jaula de ardilla se mueva.
Los devanados del estator de un motor trifásico se pueden conectar según un circuito “estrella” o “triángulo”, mientras que para alimentar el motor según un circuito “estrella” se requerirá un voltaje superior al del circuito “triángulo”. en el motor, por lo tanto se indican 2 voltajes, por ejemplo: 127/220 o 220/380. Los motores trifásicos son indispensables para accionar diversas máquinas, cabrestantes, sierras circulares, grúas, etc.

Motor asíncrono trifásico con rotor bobinado.
Un motor asíncrono trifásico con rotor de fase tiene un estator similar a los tipos de motores descritos anteriormente, un circuito magnético laminado con 3 devanados colocados en sus ranuras, pero el rotor de fase no está lleno de varillas de duraluminio, sino de tres devanados reales. El devanado de fase ya está tendido, en conexión en “estrella”. Los extremos de la estrella devanada del rotor se conducen hacia tres anillos de contacto montados en el eje del rotor y separados eléctricamente del mismo.
A través de escobillas se suministra, entre otras cosas, tensión alterna trifásica a los anillos y la conmutación se puede realizar directamente o mediante reóstatos. Por supuesto, los motores con rotor bobinado son más caros, aunque su par de arranque bajo carga es mucho mayor que el de los motores con rotor de jaula de ardilla. Precisamente gracias al aumento de la fuerza y al enorme par de arranque, este tipo de motor se ha utilizado en accionamientos de ascensores y grúas, es decir, donde el dispositivo arranca bajo carga y no al ralentí, como en los motores con motor de ardilla. rotor de jaula.
motores de corriente continua Diseñado para convertir la energía de corriente continua en trabajo mecánico.
Los motores de CC son mucho menos comunes que los motores de CA. Esto se debe principalmente al alto costo comparativo, al dispositivo más complejo y a las dificultades para suministrar energía. Pero a pesar de todas estas desventajas, DBT tiene muchas ventajas. Por ejemplo, los motores de CA son difíciles de regular, pero los DFC se regulan perfectamente de diversas formas. Además, los DFC tienen características mecánicas más rígidas y pueden proporcionar un par de arranque elevado.
Los motores eléctricos de CC se utilizan como motores de tracción, en el transporte eléctrico y como diversos actuadores.
Diseño de motores DC.
El diseño de un motor de CC es similar al de un motor de CA, pero aún existen diferencias significativas. En el marco 7, que está hecho de acero, se instala un devanado de excitación en forma de bobinas 6. Entre los polos principales, se pueden instalar polos adicionales 5 para mejorar las propiedades del DFC. En el interior se instala una armadura 4, que consta de un núcleo y un colector 2, y se instala mediante cojinetes 1 en la carcasa del motor. El conmutador es una diferencia significativa con respecto a los motores de CA. Está conectado a las escobillas 3, lo que permite suministrar o, por el contrario, eliminar tensión del circuito del inducido en los generadores.
Principio de funcionamiento
El principio de funcionamiento del DPT se basa en la interacción de los campos magnéticos del devanado de excitación y la armadura. Puedes imaginar que en lugar de una armadura tenemos un marco a través del cual fluye la corriente, y en lugar de un devanado de excitación, un imán permanente con polos N y S. Cuando la corriente continua fluye a través del marco, el campo magnético del imán permanente comienza a actúa sobre él, es decir, el marco comienza a girar y, dado que la dirección de la corriente no cambia, la dirección de rotación del marco sigue siendo la misma.
Cuando se aplica voltaje a los terminales del motor, la corriente comienza a fluir en el devanado del inducido y, como ya sabemos, el campo magnético de la máquina comienza a actuar sobre él, mientras que el inducido comienza a girar, y dado que el inducido gira en En el campo magnético, comienza a formarse un EMF. Este CEM está dirigido contra la corriente, por eso se le llama CEM de regreso. Se puede encontrar usando la fórmula
Donde Ф es el flujo magnético de excitación, n es la frecuencia de rotación y Ce es el momento de diseño de la máquina, que permanece constante para ella.
El voltaje en los terminales es mayor que la EMF trasera por el valor de la caída de voltaje en el circuito del inducido.
![]()
Y si multiplicamos esta expresión por la corriente, obtenemos la ecuación del balance de potencia.
![]()



