El tipo más popular de robot doméstico. El uso de robots con fines científicos y de entretenimiento. Reportaje fotográfico
El progreso científico y tecnológico no se detiene. Las últimas tecnologías están desdibujando cada vez más los límites entre fantasía y realidad.
Los robots hace tiempo que dejaron de ser ciencia ficción. Hoy son nuestros asistentes indispensables en muchos campos de actividad. En este artículo veremos cómo son los robots más avanzados de la actualidad y qué pueden hacer.
rover curiosidad

El rover de tercera generación en Marte más avanzado hasta la fecha. La NASA invirtió 10 años y 2.500 millones de dólares en su desarrollo. En esencia, se trata de un laboratorio químico autónomo sobre ruedas, del tamaño de un coche pequeño. Fue creado específicamente para explorar el cráter Gale. Curiosity está literalmente repleto de todo tipo de instrumentos y sensores que pueden hacer casi de todo, desde tomar fotografías de alta resolución hasta análisis espectrales de rocas duras del suelo.
Geminoide DK

Este es uno de los robots humanoides más realistas. Fue construido por Hiroshi Ishiguro junto con sus colegas del Instituto Internacional de Investigación en Telecomunicaciones Avanzadas de Japón. La apariencia de este robot es una copia exacta del profesor Henrik Scharfe de la Universidad de Aalborg. Geminoid DK se puede controlar de forma remota mediante tecnología avanzada de captura de movimiento. Permite que la máquina imite expresiones faciales y repita movimientos con precisión.
baxter

Baxter es un robot industrial inusual, aunque parece bastante normal. Estos modelos se pueden encontrar en casi todas las empresas de construcción de maquinaria más o menos modernas. Su característica principal es una mayor seguridad. Los robots industriales convencionales no se diferencian en absoluto en esta característica. Si una persona tiene la mala suerte de caer bajo sus pinzas mecánicas, entonces todo puede terminar de manera bastante triste. Pero no en el caso de Baxter. En su “cabeza” hay una cámara que se asegura de que no haya objetos extraños en el campo de actividad. Si se encuentra alguno, los motores ultrasónicos que controlan las empuñaduras de los "brazos" mecánicos liberan automáticamente las "pinzas".
Pablo

Paul es quizás el que menos se parece a un robot en el sentido tradicional. Pero lo que hace es simplemente asombroso. Se trata de un verdadero robot artista, que consta de un solo brazo mecánico que sostiene un lápiz o una pluma estilográfica. El proceso de dibujo es extremadamente simple: una persona se sienta frente a una cámara que escanea su rostro y luego la "mano" de Paul comienza a dibujar un retrato. Además, el robot no dibuja según una plantilla; cada retrato, incluso el de la misma persona, resulta único. Sus dibujos realmente tienen algo de estilo.
Gato montés

Desarrollado por la famosa empresa Boston Dynamics. Se trata de un robot de reconocimiento capaz de moverse por terrenos accidentados y en modo galope puede acelerar hasta 25,7 km/h. Sí, sí, este robot puede galopar. Y también detenerse bruscamente y darse la vuelta. Además, WildCat es increíblemente estable; dejarlo caer es un verdadero problema.
S-uno

Un robot de rescate de la empresa japonesa Schaft, que finalmente fue comprada por Google (además de Boston Dynamics, por cierto). S-One es un robot pequeño, robusto, extremadamente estable y muy fuerte. Puede levantar pesas, operar un taladro y manejar fácilmente válvulas y manijas de puertas. Gracias a nuevos desarrollos especiales, los creadores del robot lograron lograr una velocidad y fluidez increíbles al completar las tareas asignadas.
sub1

Este robot fue creado por dos desarrolladores de software estadounidenses, Jay Flatland y Paul Rose. El robot consta de 6 motores paso a paso, 4 cámaras web y una pequeña cantidad de piezas disponibles públicamente. Y su tarea principal es resolver el cubo de Rubik. Y lo hace, piénselo, en menos de un segundo. Entre las personas, el récord de resolución rápida del cubo de Rubik pertenece ahora al adolescente estadounidense Lucas Etter. En otoño de 2015, resolvió el cubo en 4,9 segundos. El robot Sub1 necesitó sólo 0,887 segundos.
robot de fila

El último avance de científicos de la Universidad de Bristol. Row-bot es un prototipo de robot diseñado para moverse a lo largo de la superficie de cuerpos de agua contaminados y comer microbios que, de hecho, ensucian el agua. Cabe destacar que Row-bot utiliza los microbios “comidos” como biocombustible para generar energía y seguir trabajando.

M-2000iA/1700L

La empresa japonesa FANUC ha desarrollado el robot más potente del mundo. Su nombre, por supuesto, no es muy eufónico, pero sus capacidades son realmente impresionantes. El hombre fuerte robótico con una “envergadura de brazos” de 4,7 metros puede levantar objetos que pesan hasta 1.700 kg. El anterior robot más poderoso del planeta, Titán, podía manipular objetos que pesaban hasta 1 tonelada, pero su "brazo" era un poco más largo: 6,5 metros.
Atlas

La empresa Boston Dynamisc presentó recientemente al público en general una nueva generación de su robot llamado Atlas. Sus habilidades son simplemente asombrosas. Un robot humanoide de dos patas camina fácilmente por un bosque invernal con un terreno muy difícil. Al mismo tiempo, mantiene el equilibrio incluso cuando sus pies caen en la nieve. Pero si cae, el robot puede levantarse independientemente desde casi cualquier posición.
Hay muchas formas de definir diferentes tipos y tipos de robots. Como podemos ver, los posibles desacuerdos varían mucho. La razón principal de estas diferencias es que los diferentes científicos y profesores a menudo tienen puntos de vista diferentes sobre lo que se debe enseñar en el marco de la "robótica".
Por ejemplo, algunos profesores que enseñan robótica tienden a centrarse principalmente en la robótica industrial, ignorando por completo los robots de servicio. Por eso, cuando se habla de los tipos y tipos de robots, se suele hablar de los tipos de robots industriales. Hay una buena razón para esto: la gran mayoría de los ingenieros en robótica trabajarán principalmente con robots industriales en sus carreras.
Sin embargo, los robots industriales no son los únicos. Por tanto, como vemos, a la hora de dividir los robots en tipos, esta división debe ser lo suficientemente amplia como para incluir todo lo que pueda entenderse como robot.
Hay dos formas posibles de hacer esto. En primer lugar, puedes dividir los robots en tipos según su aplicación y, en segundo lugar, según la forma en que se mueven (o no). Reconocemos que existen otras formas posibles de clasificar los robots en tipos, pero en nuestra opinión estas dos son las mejores. Además, preferimos utilizar ambas clasificaciones juntas. Así, ya quedarán respondidas dos preguntas sobre el robot: “¿Qué hace?” y "¿Cómo sucede esto?"
Tipos de robots en el mundo
Actualmente, los robots realizan muchas tareas diferentes en muchos campos, y el número de tareas asignadas a los robots aumenta constantemente. Por eso, en nuestra opinión, una de las mejores formas de clasificar los robots en tipos es por aplicación.
Qué tipos de robots existen:
Robots industriales.
Los robots industriales son robots utilizados en entornos de producción industrial. Por lo general, se trata de brazos articulados diseñados específicamente para aplicaciones como soldadura, procesamiento de materiales, pintura y otras. Si juzgamos únicamente por la demanda, este tipo también puede incluir algunos vehículos guiados automáticamente y otros robots.
Robots domésticos.
Los robots domésticos son robots que se utilizan en el hogar. Este tipo de robots incluye muchos dispositivos completamente diferentes, como aspiradoras robóticas, limpiafondos robóticos, barredoras, limpiadores de canaletas y otros robots que pueden realizar diferentes tareas. Además, algunos robots de vigilancia y telepresencia pueden considerarse robots domésticos si se utilizan en este entorno.
Robots médicos.
Los robots médicos son robots utilizados en entornos de medicina y atención sanitaria. En primer lugar, los robots quirúrgicos. Además, algunos vehículos de guiado automático y posiblemente asistentes de elevación.
Robots de servicio.
Los robots de servicio son robots que no entran en otros tipos de uso. Estos podrían ser diferentes robots de recopilación de datos, robots creados para demostrar tecnología, robots utilizados para investigación, etc.
Robots militares.
Los robots militares son robots utilizados en el ejército. Este tipo de robots incluye robots destructores de bombas, varios robots de transporte y drones de reconocimiento. A menudo, los robots creados originalmente con fines militares pueden utilizarse en la aplicación de la ley, la búsqueda y el rescate y otros campos relacionados.
Robots entretenidos.
Los robots de entretenimiento son robots que se utilizan para el entretenimiento. Esta es una categoría muy amplia. Comienza con robots de juguete como el robosapien o un despertador que funciona, y termina con pesos pesados reales como brazos robóticos articulados utilizados como simuladores de movimiento.
Robots espaciales.
Nos gustaría distinguir los robots utilizados en el espacio como un tipo aparte. Este tipo incluiría robots utilizados en la Estación Espacial Internacional, el Canadarm, que se utilizó en el Transbordador, así como vehículos exploradores de Marte y otros robots utilizados en el espacio.
Ahora bien, como puedes ver, hay ejemplos que encajan en más de uno de estos tipos. Por ejemplo, puede haber un robot de exploración de aguas profundas que pueda recopilar información valiosa que pueda utilizarse con fines militares.
Cinemática de robots y sus tipos.
Como puedes imaginar, la aplicación del robot no proporciona suficiente información cuando se trata de un robot específico. Por ejemplo, un robot industrial; normalmente cuando hablamos de robots industriales, pensamos en robots estacionarios en una celda de trabajo que realizan una tarea específica. Está bien, pero ¿qué pasa si la fábrica tiene un AGV (vehículo guiado automáticamente)? También es un dispositivo robótico que opera en un entorno industrial. Por lo tanto, proponemos utilizar ambas clasificaciones juntas.
Entonces hay:
1. Robots estacionarios (incluidos brazos robóticos con un eje de movimiento global)
1.1 Robots cartesianos/pórtico
1.2 robots cilíndricos
1.3 robots esféricos
1.4 robots SCARA
1.5 Robots articulados (brazos robóticos)
1.6 robots paralelos
2. Robots con ruedas
2.1 Robots de una sola rueda (bola)
2.2 Robots de dos ruedas
2.3 Robots de tres o más ruedas
3. Robots ligeros
3.1. Robots bípedos (robots humanoides)
3.2 robots robóticos
3.3 robots de cuatro patas
3.4 robots hexagonales
3,5 número diferente de patas
4. Robots nadadores
5. Robots voladores
6. Robots esféricos móviles (bolas robóticas)
7. Enjambre de robots
8. Otros...
¿Quieres saber sobre los demás? Sí, hay otros. Por ejemplo, robots con forma de serpiente. Hay muchas áreas de investigación que se centran en diferentes tipos innovadores de robots. Serán muy útiles algún día. Sin embargo, ahora los usaremos bajo el tipo "otro".
Por supuesto, nada de esto está grabado en piedra, especialmente en robótica, donde las cosas cambian casi mensualmente en estos días. Sin embargo, en nuestra opinión, este tipo de clasificaciones hacen bastante bien su trabajo.
Robots. Siguen siendo exóticos, pero sin embargo, cada vez entran con más confianza en nuestras vidas. Las tres leyes de la robótica de Isaac Izimov pronto dejarán de ser sólo literatura de entretenimiento. Los robots son criaturas que fascinan y asustan al mismo tiempo con su humanidad y al mismo tiempo su maquinaria. La producción de robots está en constante evolución. Echa un vistazo a los diez ejemplares más interesantes hasta la fecha.
ASIMO: Robot humanoide

ASIMO es un robot humanoide creado por Honda. Con una altura de 130 centímetros y un peso de 54 kilogramos, el robot parece un pequeño astronauta que lleva una mochila. Puede caminar sobre dos piernas, imitando el andar humano, a una velocidad de 6 km/h. ASIMO se creó en Japón en el Centro de Investigación y Desarrollo de Honda. Este es el último modelo de la serie, y hay once en total; el primer robot se creó en 1986.
Oficialmente, el nombre del robot es una abreviatura de "Advanced Step in Innovative MObility", es decir, literalmente "Advanced Step in Advanced Mobility". En 2002, había 20 robots ASIMO. Producir cada uno cuesta un millón de dólares y algunas copias se pueden alquilar por 150.000 dólares al mes.
Reconocimiento de objetos en movimiento
Utilizando información visual recopilada por una cámara de vídeo montada en la cabeza del robot, ASIMO reconoce los movimientos de muchos objetos y también estima la distancia a ellos y su dirección. Utilizando un conjunto de estas tecnologías, el robot puede monitorear los movimientos de las personas con una cámara, seguir a una persona o saludarla cuando se acerca.
Reconocimiento de poses y gestos.
ASIMO puede interpretar posiciones y movimientos de las manos, reconocer posturas y gestos. Gracias a esto, el robot puede responder no sólo a comandos de voz, sino también a los movimientos naturales del cuerpo de las personas. Así, por ejemplo, comprende cuando le ofrecen un apretón de manos o cuando una persona le saluda con la mano y corresponde. Además, comprende cuándo se le indica la dirección del movimiento.
Reconocimiento ambiental
ASIMO es capaz de analizar los objetos y el paisaje circundantes y actuar de forma segura para él y las personas cercanas. Por ejemplo, reconoce objetos potencialmente peligrosos, como escaleras, y detiene o evita a personas y otros objetos en movimiento para evitar chocar con ellos.
Reconocimiento de sonido
La capacidad del robot para reconocer el tipo de sonidos se ha profundizado y ahora sabe la diferencia entre voces y otros sonidos. Responde a su nombre, se vuelve hacia la persona con la que está hablando, reacciona ante sonidos repentinos e inusuales, como la caída de un objeto o una colisión, y gira la cabeza en esa dirección.
Reconocimiento facial
ASIMO puede reconocer rostros humanos incluso cuando la persona está en movimiento. Puede distinguir por separado 10 rostros humanos. Una vez registrados en su memoria, se referirá a ellos por su nombre.

Albert Hubo: Robot Einstein

Robot Albert HUBO es un robot androide. Su apariencia Consiste en una cabeza que copia la cabeza del científico Albert Einstein y el torso del famoso robot humanoide Hubo. El período de desarrollo duró tres meses y finalizó en noviembre de 2005. La cabeza fue diseñada por Hanson-Robotics. La carrocería está hecha de un material específico, Frubber, que se utiliza a menudo en Hollywood.
La cabeza tiene 35 articulaciones, gracias a las cuales puede expresar diversas emociones en el rostro, mediante movimientos independientes de los ojos y los labios. También hay dos cámaras CCD en el cabezal para reconocimiento visual. Además, Albert puede realizar todas las actuaciones inherentes a Hubo, por lo que es posible expresar movimientos y comportamientos humanos aún más naturales. Las baterías de polímero de litio están ocultas en el cuerpo, lo que proporciona aproximadamente dos horas y media de duración de la batería del robot.
Utilizando una red remota, el robot Albert puede ser controlado desde una computadora externa. Albert Humo se presentó por primera vez en 2005 en la cumbre de APEC en Busan (Corea). Fue elogiado por muchos líderes mundiales: el presidente de los Estados Unidos, el primer ministro de Japón, etc.

Stanley: vehículo autónomo
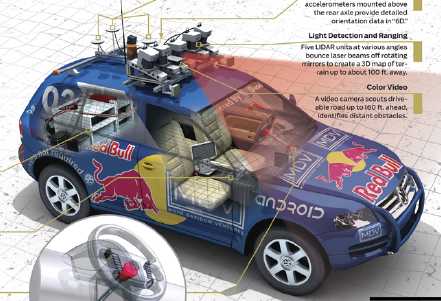
Stanley es un vehículo autónomo creado por el equipo de carreras de la Universidad de Stanford. Se trata de un Volkswagen Touareg corriente, modificado para permitir el control únicamente mediante ordenadores de a bordo. Compitió y ganó el DARPA Grand Challenge en 2005 y le valió al equipo de carreras de Stanford un premio de 2 millones de dólares, el premio en efectivo más grande en la historia de los robots.
Los sensores utilizados en Stanley incluyen cinco lidares láser, un par de radares, una cámara estéreo y una cámara de lente única. El receptor GPS, la brújula GPS y el sistema de control inercial procesan la información y determinan la posición del vehículo, y la información sobre la odometría de las ruedas la recibe el bus CAN interno del Tuareg. La parte informática está formada por seis potentes ordenadores Intel Pentium M con diferentes configuraciones y sistemas operativos Linux.
Stanley está equipado con un sistema para detectar obstáculos que se aproximan. Los datos de los lidars se combinan con imágenes del sistema visual para crear una imagen más completa de la vista. Si no se puede reconocer una carretera aceptable durante al menos los siguientes 40 metros, se reduce la velocidad y los lidars buscan un camino seguro.
Por cierto, la conducción de Stanley se programó utilizando grabaciones de conducción humana en el desierto y luego asignando un valor preciso a cada bit de información generada por su sistema de sensores. Tras esta modificación, el coche robot comenzó a rodar a una velocidad de 45 kilómetros por hora por carreteras atravesadas por sombras de árboles. Hasta que se establecieron los valores exactos de los datos, el coche se salió de la carretera con miedo, confiando en que el camino no estaba atravesado por sombras, sino por agujeros.

BigDog: Mula robot

BogDog (BigDog, literalmente - Big Dog) es un robot de cuatro patas creado por Boston Dynamics en 2005. El Proyecto BigDog fue financiado por la Agencia de Proyectos de Investigación Avanzada de Defensa con la esperanza de que la creación pudiera servir como una mula robótica para soldados en terrenos demasiado accidentados para el transporte.
BigDog pesa 75 kilogramos, mide un metro de largo y 0,7 metros de alto. Actualmente, puede desplazarse por terrenos difíciles a una velocidad de 5,3 km/h, soportar un peso de 54 kilogramos y subir pendientes de 35 grados.

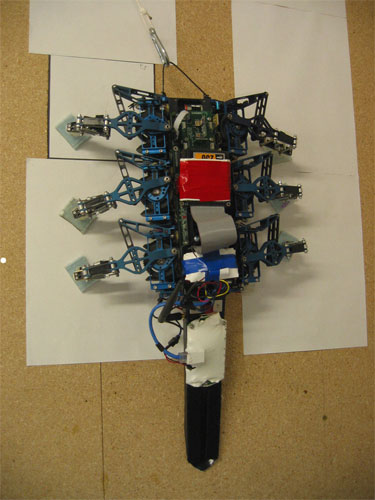
RiSE: robot trepador

Rise (RiSE) es un pequeño robot de seis patas que trepa por superficies verticales: paredes, árboles, vallas. Los talones de Ryze tienen garras, microgarras o material pegajoso, dependiendo de la superficie por la que trepe. El robot cambia de postura para adaptarse a la pendiente de la superficie y la cola fija ayuda a mantener el equilibrio en superficies empinadas. El bebé pesa sólo 2 kilogramos, mide 0,25 metros de largo y corre a una velocidad de 0,3 m/s.
Cada una de las seis patas del robot está equipada con dos motores eléctricos. La computadora de a bordo controla las patas, determina el método de comunicación con el suelo y analiza una variedad de sensores. Incluyendo un sensor que calcula la inercia, un sensor de posición de la articulación de cada pata, un sensor de tensión de la pata y un sensor de contacto del pie.
Las versiones futuras de Ryze utilizarán adherencia seca para escalar superficies perfectamente lisas y escarpadas, como vidrio y metal. Rise fue desarrollado conjuntamente por investigadores de la Universidad de Pensilvania, Carnegie Mellon, Berkeley, Stanford y la Universidad Lewis y Clark. El proyecto fue patrocinado por la Oficina de Defensa Científica de DARPA.
QRIO: robot bailarín
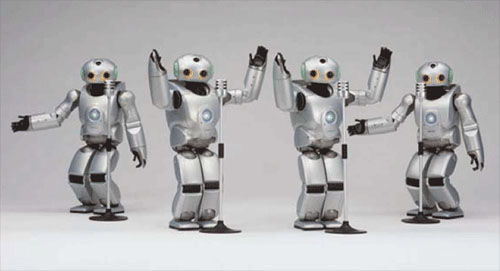
QRIO ("Quest for cuRIOsity") es un robot humanoide bípedo para entretenimiento, creado y vendido por Sony para continuar el éxito de su juguete AIBO (perro robot). QRIO mide 0,6 metros de altura y pesa 7,3 kilogramos.
El robot puede reconocer voces y rostros, gracias a lo cual puede recordar a las personas y sus gustos y aversiones. Puede correr a una velocidad de 23 cm por segundo, lo que está registrado en el Libro Guinness de los Récords (2005) como el primer robot de dos piernas más rápido en correr. El robot QRIO de cuarta generación funciona con batería durante una hora.
La cuarta generación de estos robots puede bailar Hell Yes, un vídeo musical de Beck. Estos especímenes cuentan con una tercera cámara en la frente y brazos y muñecas mejorados. Los programadores trabajaron durante tres semanas para enseñar coreografías a estos robots.
Karimov Murat
Se realizó un estudio sobre el tema: "Clasificación de robots". En el proceso de trabajo se estudió la literatura científica y una gran cantidad de diversos recursos de Internet sobre este tema. El trabajo examina el concepto de robot y su estructura, la historia del surgimiento y desarrollo de la robótica y también analiza los principios de la estructura de los robots. A partir de las diferencias identificadas se realizó una clasificación de estos dispositivos automáticos.
A partir de los resultados del trabajo realizado, se pueden sacar las siguientes conclusiones de que las clasificaciones presentadas en el trabajo no son completas y exhaustivas, debido a que la robótica y la robótica ofrecen cada vez más tipos nuevos de robots, según el necesidades de la vida y la actividad humanas. Y ese tipo de dispositivos automáticos que se presentan en la obra se mejoran rápidamente, respondiendo a las peticiones humanas diarias. Sin embargo, la invención de nuevos tipos de robots y su implementación en la vida debe realizarse respetando todas las normas morales. Lo principal que debe recordar una persona, un científico o un inventor es que un robot es una creación con inteligencia artificial, y cómo, dónde y para qué fines se utilizará dicho dispositivo depende completamente de las personas.
Descargar:
Avance:
Para utilizar vistas previas de presentaciones, cree una cuenta de Google e inicie sesión en ella: https://accounts.google.com
Títulos de diapositivas:
Clasificación de robots
Faro de Faros. Caballero mecánico según el dibujo de Leonardo da Vinci.
Mula robot de cuatro pezuñas LS3 creada por Boston Dynamics Robot androide andante Asimo creado por Honda Corporation
Robot volador: misil de crucero estadounidense Tomahawk Robots que se arrastran con forma de serpiente
Clasificación de robots por tipo de control. Biotecnológico Automático Interactivo
El perro robot del ejército estadounidense "BigDog" de la empresa Boston Dynamics. El robot explorador con forma de cucaracha. El robot transformador japonés WR-07 pasa de ser un vehículo a una forma humanoide. Las hormigas biónicas de Festo pueden comunicarse entre sí. Un grupo de hormigas robóticas trabaja en conjunto, resolviendo incluso los problemas más confusos. Clasificación de robots por apariencia.
Stanley: un vehículo autónomo creado por el equipo de carreras de la Universidad de Stanford a partir de un automóvil Volkswagen y modificado para ser controlado únicamente por computadoras a bordo. El dron robótico (drone) Lotus de Joby Aviation fue desarrollado conjuntamente con la NASA y presentado en la feria. Exposición Unmanned Systems 2015 en Atlanta, EE. UU. Brazo robótico Shadow Robot Hand. Este robot imita fielmente la mano humana, incluidas las almohadillas sensoriales en los dedos y la detección de la temperatura del aire, y puede usarse como prótesis.
Robots humanoides – androides. Asimo Albert Hubo (Einstein Robot) Aiko
Clasificación de robots por finalidad funcional Robot de farmacia Robot industrial
Robot submarino Robot doméstico Robot de combate
Robot médico Nanorobot Programa de robot
Sólo los humanos son responsables de cómo diseñan, construyen, utilizan y tratan a los robots y otras creaciones con inteligencia artificial.
Avance:
MAOU "Escuela secundaria n.º 39 con estudio en profundidad del inglés" Distrito Vakhitovsky de Kazán
Trabajo de investigación
en el marco del XVII Concurso infantil de investigación científica y trabajos creativos de toda Rusia "PRIMEROS PASOS EN LA CIENCIA"
Tema: “Clasificación de robots”
Trabajo completado:
Karimov Murat Irekovich
estudiante de 1er grado "D"
MAOU "Escuela secundaria nº 39" Kazán
Supervisor científico:
Makarova Elena Ivanovna
maestro de escuela primaria
I categoría de calificación
MAOU "Escuela secundaria nº 39" Kazán
Curso académico 2015-2016
Introducción página 3
- Robots. Historia de la creación y desarrollo de la robótica. pagina 4
- Dispositivo robótico. página 7
- Principales tipos de robots:
- Manipulación y robots móviles. página 8
- Clasificación de robots porforma de moverse. página 9
- Clasificación de robotspor tipo de control. página 11
- Clasificación de robots por apariencia. robot androide. página 13
- Clasificación de robots por finalidad funcional. página 17
Conclusión página 24
Lista de literatura usada página 26
Introducción.
Hoy en día es difícil imaginar el mundo moderno sin robots. Estos dispositivos automáticos, creados por el hombre para diversos fines: educativos, industriales, de entretenimiento, etc., se han arraigado firmemente en nuestras vidas. Ahora un robot no es una fantasía, ni un sueño, sino una realidad. Un robot aspirador le ayudará con la limpieza, un robot volador vigila las fronteras de nuestro país, un programa de robot le ayudará a encontrar rápidamente la información necesaria en Internet si la solicita. Para comprender mejor las perspectivas de desarrollo de la robótica y el uso de robots en el futuro, es necesario dominar el concepto de robot, descubrir cómo y de qué se ensamblan, cómo y quién los controla, qué oportunidades que se abren para una persona cuando utiliza dicha tecnología y qué problemas enfrenta al mismo tiempo.
El objetivo de este trabajo fue estudiar el concepto de “robot”, su estructura y rastrear el desarrollo de la robótica a lo largo del tiempo. Dependiendo de la estructura y finalidad de los robots se realizó una clasificación de estos dispositivos automáticos, que era el objetivo del trabajo. El trabajo presenta clasificaciones comprensibles para una persona sin educación técnica especial. Los robots se dividen según la siguiente base:método de movimiento, tipo de control, apariencia y funcionalidad.
En trabajos posteriores está previsto estudiar los robots y clasificarlos no desde el punto de vista de la mecánica, sino desde el punto de vista de otras ciencias: la informática y la electrónica.
I. Robots. Historia de la creación y desarrollo de la robótica.
Según el Instituto Americano para el Estudio de la Tecnología Robótica, un robot es un manipulador multifuncional reprogramable diseñado para mover materiales y objetos para realizar diversas tareas. El Diccionario de Inglés Webster define un robot como "un aparato o dispositivo autónomo que realiza diversas actividades humanas y las realiza como si estuviera bajo el control de la inteligencia humana". Las definiciones anteriores de robot combinan tres funciones principales: la capacidad de realizar determinadas acciones, la capacidad de realizar diversas tareas de forma programada y la capacidad del robot para interpretar y modificar las respuestas a los comandos del operador.
La palabra "robot" proviene del idioma eslovaco ( robot, de robota - trabajo forzoso) y significa un dispositivo automático. Un dispositivo de este tipo funciona según un programa preprogramado y recibe información sobre el mundo circundante a través de sensores, al igual que los organismos vivos a través de sus sentidos. El robot realiza de forma independiente una variedad de operaciones que normalmente realiza una persona. En este caso, el robot puede recibir órdenes de una persona o actuar de forma independiente (de forma autónoma).
El concepto de “robot” fue utilizado por primera vez por el escritor checo Karel Capek en la obra “R. UR.” ("Robots universales de Rossum") en 1920.
Desde la antigüedad, la humanidad ha intentado utilizar máquinas para facilitar su trabajo, para realizar los trabajos más difíciles que requerían un importante esfuerzo físico.
Las primeras criaturas artificiales se mencionan en los mitos de la antigua Grecia. El mito sobre Cadmo dice que, después de matar una enorme serpiente, esparció sus dientes en el suelo y los aró, y de los dientes crecieron soldados. El mito del escultorPigmalión cuenta cómo le dio vida a la estatua que creó: Galatea. Además, el mito de Hefesto cuenta cómo se forjó asistentes mecánicos, que avivaban el fuego bombeando fuelles. Tanto la cultura escandinava como los pueblos orientales tienen mitos y leyendas sobre criaturas mecánicas creadas para ayudar.
El primer uso práctico de personas mecánicas con control automático se remonta al siglo III a. C. En el faro de la isla de Pharos (una de las 7 maravillas del mundo) se instalaron estatuas y figuras mecánicas. Por ejemplo, una de las figuras siempre apuntaba con la mano al sol a lo largo de su trayectoria y la bajaba cuando se ponía, otra tocaba cada hora día y noche, y con la tercera se podía saber la dirección.
Los prototipos de robots también fueron figuras mecánicas creadas por el científico e inventor árabe Al-Jazari (1136-1206). Creó un barco con cuatro músicos mecánicos que tocaban panderetas, arpa y flauta.
Leonardo da Vinci hizo un dibujo de un robot humanoide alrededor de 1495. Sus notas, encontradas en los años 50, contenían dibujos detallados de un caballero mecánico capaz de sentarse, extender los brazos, mover la cabeza y abrir la visera. Lo más probable es que el diseño se base en los estudios anatómicos del científico. Se desconoce si Leonardo intentó construir un robot de este tipo.
En los siglos XVI-XVIII en Europa, la construcción de autómatas se generalizó en Europa: mecanismos de cuerda que se parecen externamente a humanos o animales y, a veces, son capaces de realizar movimientos bastante complejos. Uno de los primeros ejemplos de tales autómatas es el "monje español" (de unos 40 cm de altura), capaz de caminar, golpearse en el pecho con la mano derecha, asentir con la cabeza, periódicamente lleva la cruz en la mano izquierda a sus labios y lo besa. Se cree que este autómata se fabricó hacia 1560.
Desde principios del siglo XVIII comenzaron a aparecer informes de máquinas con “signos de inteligencia”, pero en la mayoría de los casos resultó que se trataba de un fraude. Dentro de los mecanismos se escondían personas vivas o animales entrenados.
A finales del siglo XIX. Al ingeniero ruso Pafnuty Chebyshev se le ocurrió la idea de un andador, el primer mecanismo para caminar del mundo con una alta capacidad de cross-country. También a finales del siglo XIX. Nikola Tesla desarrolló y demostró un barco en miniatura controlado por radio.
En los años 30 del siglo XX, aparecieron diseños de dispositivos que se asemejaban en apariencia a una persona, capaces de realizar movimientos simples y reproducir frases según las órdenes de una persona.
En 1968, la empresa japonesa Kawasaki Heavy Industries, Ltd. montó su primer robot industrial. Desde entonces, Japón ha iniciado un camino firme hacia convertirse en la capital mundial de los robots, con más de 130 empresas involucradas en su producción. Actualmente, Japón representa alrededor del 45% de los robots industriales del mundo.
La robótica (de robótica y tecnología) es una ciencia que se ocupa del desarrollo de sistemas técnicos automatizados para la producción. Esta ciencia se basa en disciplinas como la electrónica, la mecánica, la telemecánica, la informática, así como la ingeniería de radio y la ingeniería eléctrica. Hay robótica de construcción, industrial, doméstica, de aviación, extrema: militar, espacial, submarina y otros tipos de robótica.
II. Dispositivo robótico
La apariencia y el diseño de los robots modernos son variados. ENproducción industrialSe utilizan robots que no se parecen en nada a los humanos. Esto se debe al hecho de que crear una especie humanoide no siempre es económicamente rentable. Y para algunos procesos técnicos industriales esto no es necesario. Con toda su diversidad, estos dispositivos automáticos tienen componentes comunes y un principio general de funcionamiento de los dispositivos.
Los actuadores son los “músculos” de los robots. Actualmente, los motores más populares en los accionamientos son eléctricos, pero también se utilizan otros que utilizan productos químicos o aire comprimido, como los motores piezoeléctricos, donde diminutas patas piezoeléctricas que vibran a más de 1.000 veces por segundo hacen que el motor se mueva en círculo o en línea recta. línea. Los músculos aéreos son un dispositivo simple pero poderoso para proporcionar tracción. Cuando se bombean con aire comprimido, los músculos pueden contraerse hasta el 40% de su longitud. La razón de este comportamiento es un material tejido especial que puede estirarse y encogerse.
Sin embargo, el término "robot" se utiliza no sólo para dispositivos automáticos, sino también para ordenadores. programas , ejemplos de los cuales pueden ser, por ejemplo,bots o robots de búsqueda. El resultado del trabajo del robot de búsqueda es un grannúmero de respuestas a una consulta de búsqueda. Un sistema de información de este tipo es bastante eficaz, ya que puede atender a un mayor número de personas proporcionándoles la información necesaria.
III. Principales tipos de robots (clasificación)
1. Manipulación y robots móviles
Las principales clases de robots son los robots manipuladores y móviles.
Un robot de manipulación es una máquina automática (fija o móvil), que consta de un actuador en la forma manipulador , que tiene varios grados de movilidad, y un dispositivo de control de programa, que sirve para realizar funciones motoras y de control en el proceso de producción. Estos robots se fabrican en versiones de suelo, suspendidas y de pórtico. Están más extendidos en las industrias de construcción de maquinaria e instrumentos.
Un robot móvil es una máquina automática que tiene un chasis móvil con accionamientos controlados automáticamente. Estos robots pueden moverse sobre ruedas, caminar o rastrearse (también hay sistemas robóticos móviles que se arrastran, flotan y vuelan).
Los robots también se dividen:
1. Por método de movimiento
2. Por tipo de control
3. Por apariencia
4. Por funcionalidad
Echemos un vistazo más de cerca a cada tipo de robot.
2. Clasificación de robots por método de movimiento.
Según el método de movimiento, los robots se dividen en con ruedas, sobre orugas, caminando, volando, gateando y flotando.
Los robots más comunes son los de cuatro ruedas y los de orugas.robots . También hay robots que tienen diferente número de ruedas: dos o una. Este tipo de soluciones permiten simplificar el diseño del robot, además de darle la capacidad de trabajar en espacios más estrechos, donde un diseño de cuatro ruedas sería bastante ancho e incómodo. Sin embargo, para la estabilidad de los robots de dos ruedas se necesitan dispositivos de equilibrio especiales. Los robots de una sola rueda son, en muchos sentidos, un desarrollo de ideas asociadas con los robots de dos ruedas. Para moverse en el espacio, se puede utilizar como única rueda una bola impulsada por varios accionamientos. Un ejemplo sería un robot de pelota. Para desplazarse sobre superficies irregulares, hierba y terrenos rocosos se están desarrollando robots de seis ruedas, que tienen más tracción que los de cuatro ruedas. Las orugas proporcionan una tracción aún mayor. Por ejemplo, muchos robots de combate modernos, así como los robots diseñados para moverse sobre superficies rugosas, están diseñados como orugas.
Mover un robot andante utilizando sus “piernas” es un problema dinámico complejo. Ya se han creado varios robots de este tipo, pero aún no pueden lograr el mismo movimiento estable inherente a los humanos. Los robots que utilizan dos patas tienden a moverse bien en el suelo y algunos diseños pueden subir escaleras. También se han creado muchos mecanismos que se mueven sobre más de dos extremidades, por ejemplo, un perro robot, una mula robot o una cucaracha robot. Estas estructuras son más fáciles de diseñar.
La mayoría de los aviones modernos son robots voladores controlados por pilotos. El piloto automático puede controlar el vuelo en todas las etapas, incluido el despegue y el aterrizaje. Los robots voladores también incluyen vehículos aéreos no tripulados, entre ellos los misiles de crucero.
Hay una serie de desarrollos de robots rastreros que se muevencomo serpientes o gusanos. Supuestoque este método de movimiento puede darles la capacidad de moverse en espacios estrechos. Por ejemplo, pueden utilizarse para buscar personas bajo los escombros de edificios derrumbados.
También hay novedades en robots flotantes. Se mueven en el agua como peces o medusas. Estos dispositivos son bastante silenciosos y maniobrables.
Los robots que participan en la producción en instalaciones industriales se mueven con mayor frecuencia a lo largo de monorraíles, vías de piso, etc. Si es necesario moverse a lo largo de planos inclinados o verticales, los robots industriales utilizan mecanismos de "caminar" con ventosas de vacío.
3. Clasificación de robots por tipo de control
Según el tipo de control, los sistemas robóticos se dividen en biotécnicos, automáticos e interactivos.
- Biotécnico:
- comando (control mediante pulsador y palanca de partes individuales del robot). Operador humano con dispositivo de mando. remotamente establece el movimiento en cada articulación. Para ser más precisos, no se trata de robots en el sentido pleno de la palabra, sino de “semi-robots”.
- copiar, repetir movimientos humanos.
- semiautomático. Estos son robots, cuando son controlados por un operador humano, que establece solo el movimiento del cuerpo de trabajo del manipulador, y la formación de movimientos coordinados en las articulaciones la lleva a cabo el sistema de control del robot de forma independiente.
2. Automático:
- software (función según un programa predeterminado, diseñado principalmente para resolver problemas monótonos en condiciones constantes). Este es el tipo de robot más simple y común. Estos robots no tienen una parte sensorial y todas las acciones se realizan cíclicamente según un programa rígido integrado en la memoria del dispositivo de almacenamiento.
- Los robots adaptativos resuelven problemas típicos, pero se adaptan a las condiciones de funcionamiento. Están equipados con una parte sensorial (sistema de detección) y con un conjunto de programas. Las señales que llegan al sistema de control desde sensores , son analizados por él y, en función de los resultados, se toma una decisión sobre las acciones futuras del robot, lo que implica una transición de un programa a otro.
- Los robots inteligentes son los sistemas automáticos más desarrollados. Estos son robots con elementos.inteligencia artificial. Utilizando dispositivos sensoriales, son capaces de percibir y reconocer la situación de forma independiente, construir un modelo del entorno y tomar decisiones automáticamente sobre acciones futuras, así como aprender por sí solos a medida que acumulan su propia experiencia operativa.
3. Interactivo:
- robots automatizados. Al controlar esta especie, es posible alternar entre los modos automático y biotécnico.
- supervisión (sistemas automáticos en los que una persona realiza solo funciones objetivo). Los robots realizan automáticamente todas las etapas de un ciclo determinado de operaciones, pero pasan de una etapa a otra según las órdenes de un operador humano.
- interactivo (el robot participa en un diálogo con una persona sobre la elección de una estrategia de comportamiento y, por regla general, el robot está equipado con un sistema experto que puede predecir los resultados de las manipulaciones y dar consejos sobre la elección de un objetivo).
Principales tareas del control del robot:
- disposiciones de planificación;
- planificación de movimientos;
- planificación de fuerzas y momentos;
- análisis de precisión dinámica;
- Identificación de características cinemáticas y dinámicas del robot.
4. Clasificación de robots por apariencia. robot androide
La apariencia y el diseño de los robots modernos pueden ser muy diversos. Como se señaló anteriormente, en la producción industrial se utilizan ampliamente varios robots, cuya apariencia (por razones técnicas y económicas) está lejos de ser "humano " Algunos programas (bots o motores de búsqueda) también se denominan robots.
En la presentación, además de los tipos industriales, se mostraron otros robots: un robot mula, un robot serpiente, robots similares a un automóvil o un tanque. Aquí hay algunos tipos más interesantes: un perro robot, un robot explorador en forma de cucaracha, un robot transformador, una hormiga robot, un automóvil autónomo, un dron robot, una mano robótica. Ya se ha creado un robot humanoide: un androide que es capaz no solo de mover brazos y piernas, realizar determinadas funciones, sino también de expresar sus emociones.- felicidad, miedo, sorpresa, tristeza, ira, disgusto - con la ayuda de gestos y expresiones faciales.
Robots humanoides modernos.
ASIMO - robot android creado por la corporación honda. Con una altura de 130 centímetros y un peso de 54 kilogramos, el robot parece un pequeño astronauta que lleva una mochila. Puede caminar sobre dos piernas, imitando el paso humano a una velocidad de 6 km/h., usa las manos, habla y escucha, ve y reconoce personas y objetos.Utilizando información visual recopilada por una cámara de vídeo montada en la cabeza del robot, ASIMO reconoce los movimientos de muchos objetos y también estima la distancia a ellos y su dirección. Utilizando un conjunto de estas tecnologías, el robot puede monitorear los movimientos de las personas con una cámara, seguir a una persona o saludarla cuando se acerca. ASIMO puede interpretar posiciones y movimientos de las manos, reconocer posturas y gestos. Gracias a esto, el robot puede responder no sólo a comandos de voz, sino también a los movimientos naturales del cuerpo de las personas. Así, por ejemplo, comprende cuando le ofrecen un apretón de manos o cuando una persona le saluda con la mano y corresponde. Además, comprende cuándo se le indica la dirección del movimiento.ASIMO es capaz de analizar los objetos y el paisaje circundantes y actuar de forma segura para él y las personas cercanas. Por ejemplo, reconoce objetos potencialmente peligrosos, como escaleras, y detiene o evita a personas y otros objetos en movimiento para evitar chocar con ellos. La capacidad del robot para reconocer el tipo de sonidos se ha profundizado y ahora sabe la diferencia entre voces y otros sonidos. Responde a su nombre, se vuelve hacia la persona con la que está hablando, reacciona ante sonidos repentinos e inusuales, como la caída de un objeto o una colisión, y gira la cabeza en esa dirección. ASIMO puede reconocer rostros humanos incluso cuando la persona está en movimiento. Puede distinguir por separado 10 rostros humanos. Una vez registrados en su memoria, se referirá a ellos por su nombre.
Robot Albert HUBO o robot einstein este es un robot androide. Su apariencia consiste en una cabeza que copia la cabeza del científico Albert Einstein y el torso del famoso robot humanoide Hubo.Modelo para prueba y reproducción por robot de humano.La cabeza tiene 35 articulaciones, gracias a las cuales puede expresar diversas emociones en el rostro, mediante movimientos independientes de los ojos y los labios. También hay dos cámaras en el cabezal para reconocimiento visual.
El robot ginoide Aiko fue creado por un robotista aficionado canadiense llamado Chung Le. Peso 30 kg, altura 151 cm. Puede hablar, leer textos, reconocer objetos y colores, resolver problemas matemáticos, responder a estímulos externos.. Al principio Aiko no podía caminar, pero ahora este problema está casi resuelto. La "piel" de Aiko está hecha de silicona suave y es capaz de "sentir dolor". El objetivo principal de la creación del proyecto Aiko es ayudar y cuidar a personas mayores y enfermas, además de trabajar en la oficina, cuidar la casa y entretener a los niños. Actualmente, Aiko habla dos idiomas: japonés e inglés. El primer modelo de Aiko tenía una voz áspera y muy poco humana. Sin embargo, la situación ha mejorado: la voz se ha vuelto más parecida a la suave voz de una niña, en gran parte gracias a un órgano único: un lenguaje humano copiado exactamente del original.
TOPIO - android diseñado para juegostenis de mesacontra una persona. Tiene apariencia humana y camina sobre dos piernas. El robot fue desarrollado en 2005 por la empresa vietnamita TOSY, que se dedica a desarrollos en el campo de la robótica. TOPIO 3 mide 1 metro 88 centímetros de alto y pesa alrededor de 120 kg. Todas las versiones del robot utilizan un sistema de inteligencia artificial de autoaprendizaje que le permite mejorar sus habilidades durante el juego.
EveR-1 es un robot que se parece a una mujer coreana de 20 años: mide 1,6 metros de altura y pesa unos 50 kilogramos. Se espera que androides como EveR puedan servir como guías turísticos, brindando información en grandes almacenes o museos.
Repliee R-1 es un robot humanoide con apariencia de niña japonesa de cinco años, diseñado para cuidar a personas mayores y discapacitadas
HRP-4C es una chica robot diseñada para exhibir ropa. La altura del robot es de 158 cm y su peso con baterías es de 43 kg. Este androide tiene expresiones faciales bastante buenas que le permiten expresar emociones.
Respuesta P2: se mostró una niña robot en la exposición internacional World Expo celebrada en Japón. En las manifestaciones, desempeñó el papel de reportero-periodista de televisión, mientras interactuaba constantemente con la gente. El robot estaba equipado con cámaras omnidireccionales, micrófonos y sensores que permitieron a Repliee Q2 detectar fácilmente el habla y los gestos humanos.
Ibn Sina es un androide que lleva el nombre del antiguo filósofo y médico persa Ibn Sina. Habla árabe, sabe encontrar su asiento en el avión por sí solo y comunicarse con la gente. Reconoce la expresión facial del hablante y utiliza expresiones faciales apropiadas a la situación. Sus labios se mueven de manera bastante monótona, pero se nota que es especialmente bueno levantando las cejas y entrecerrando los ojos.
Frank es el primer biorobot, creado en 2011 por un grupo de especialistas liderados por el Dr. Bertolt Meyer, quien es la primera persona con un brazo biónico. El "Hombre Biónico", como explican los científicos, consta de 28 partes artificiales del cuerpo humano, que actualmente están siendo dominadas por científicos y médicos. Estos incluyen el corazón, el bazo, la glándula tiroides, los riñones y los pulmones. Sin embargo, los científicos aún no han logrado recrear el cerebro humano. Ahora el "cerebro" del robot son chips electrónicos y una computadora que controla sus acciones de forma remota (a través de Bluetooth). El nuevo robot puede respirar, caminar, ver e incluso mantener una conversación.La cara del robot está hecha de silicona. El propio Bertolt Meyer le sirvió de “prototipo”.
5. Clasificación de robotspor propósito funcional
Según la finalidad funcional, se distinguen los siguientes tipos de robots:
Robot de farmacia.
Para Para automatizar el trabajo de las farmacias, ingenieros alemanes han desarrollado un robot que permite ahorrar tiempo en la búsqueda de un medicamento. En 1996, se introdujo el primer farmacéutico robótico del mundo para automatizar la dispensación de los medicamentos más populares en las farmacias.
- Robots industriales.
Robot industrial: diseñado para realizar diversas operaciones tecnológicas en el proceso de producción. Estos robots son capaces de realizar operaciones de producción las 24 horas del día. y son capaces de reemplazar a las personas en industrias peligrosas, porque no están expuestos a gases ni a la liberación de productos químicos peligrosos. Con un nivel constante de calidad del trabajo, estos mecanismos permiten aumentarproductividad laboral generalmente.
Los primeros robots industriales comenzaron a crearse a mediados de los años 50 del siglo XX en Estados Unidos. Primero se desarrollaron manipuladores de carga y descarga, luego aparecieron robots para montaje y otros trabajos.
- Robot de transporte.
Se refiere a robots industriales. Se utiliza para operaciones de carga y descarga.
Robot submarino.
Existen desarrollos rusos y extranjeros de vehículos submarinos robóticos que son capaces de operar a diferentes profundidades. Por ejemplo, el complejo móvil Panther Plus sirve para tender cables en el fondo, limpiar minas y ayudar a rescatar un submarino hundido. mi Sus manipuladores mecánicos son tan sensibles que son capaces de tejer nudos con cuerdas bajo un kilómetro de agua. Está equipado con una sierra circular para cortar cables y un cortacables para cortar alambres de acero. Los sonares y sensores instalados en él encontrarán una aguja en el espesor del limo. Los potentes focos le permiten trabajar en completa oscuridad y las cámaras ultrasensibles transmiten videos de excelente calidad a la superficie.
La Dirección de Tecnologías y Programas Avanzados de la CIA estadounidense ha desarrollado un vehículo submarino no tripulado en forma de robot bagre, diseñado para estudiar a los habitantes y cuerpos de agua submarinos.
Robot doméstico.
Un robot doméstico está diseñado para ayudar a una persona en la vida cotidiana. En 2007, Bill Gates publicó el artículo "Un robot en cada hogar" sobre el importante potencial de los robots, incluidos los domésticos y domésticos, para la sociedad. Los robots más comunes son los juguetes, los robots niñeras, los robots asistentes en el hogar, los robots guías turísticos y los robots camareros.
Los juguetes robóticos son muy diversos. Estos son robots en forma de animales, muñecos, dinosaurios. La serie de juguetes educativos LEGO incluye un kit de construcción LEGO Mindstorms para crear un robot programable.
Un robot social es capaz de interactuar y comunicarse de forma autónoma o semiautónoma con personas en lugares públicos o en casa. Se trata de robots: niñeras y cuidadoras (Wakamura, RIBA, PaPeRo, Hubo), mayordomos (Pepper, Cubic), robots de telepresencia (Romo, Double, Dasha, R.Bot, Webot, Promobot), robots profesores (android Pushkin) y asistentes. para niños con autismo (Nao) y otros tipos. Estos robots ayudan a los padres jóvenes a dormir a sus hijos. Se fijan a la cuna mediante mecanismos especiales. El llanto del bebé es captado por un micrófono. Entonces entran en juego mecanismos especiales y comienzan a mecer suavemente la cuna. También se utilizan para la rehabilitación de personas con movilidad reducida y discapacidad, dándoles la oportunidad de comunicarse, trabajar de forma remota y divertirse.
Los robots asistentes en el hogar incluyen robots aspiradores, pulidores de suelos y cortacéspedes muy populares, así como robots para limpiar piscinas y canalones. Normalmente estos robotspueden moverse de forma independiente en el interior y regresar a la estación de carga según sea necesario.
- Robot de seguridad y robot de combate.
Recientemente, los organismos encargados de hacer cumplir la ley utilizan cada vez más robots: el ejército, la policía y los servicios de emergencia.
Para el reconocimiento operativo se utilizan "robots voladores": vehículos aéreos no tripulados. Al realizar inspecciones submarinas de objetos potencialmente peligrosos y operaciones de búsqueda y rescate, el Servicio Ruso de Situaciones de Emergencia utiliza robots submarinos de la serie Gnome y sistemas robóticos de extinción de incendios.
Los robots de combate reemplazan a los humanos en situaciones de combate o cuando trabajan en condiciones incompatibles con las capacidades humanas con fines militares, por ejemplo, reconocimiento, combate, remoción de minas. Actualmente, la mayoría de los robots de combate son dispositivos de telepresencia, y sólo unos pocos modelos tienen la capacidad de realizar algunas tareas de forma autónoma, sin la intervención del operador.
El desarrollo de robots de combate se lleva produciendo desde principios del siglo XX. En 1910 surgió en Estados Unidos la idea de utilizar máquinas voladoras sin humanos. Según el plan, el dispositivo, controlado por un mecanismo de reloj, en un lugar determinado debía arrojar sus alas y caer como una bomba sobre el enemigo. Tras recibir financiación del ejército de los EE. UU., se construyeron y probaron estos dispositivos no tripulados. Pero nunca fueron utilizados en combate.
En la Unión Soviética a principios de los años 30 del siglo XX. Stalin aprobó un plan para la reorganización de las tropas, que dependían de tanques. En este sentido, se construyeronteletanques - controlado en batallas por radio a distancia, sin tripulación. Muy pronto, estos diseños descubrieron un “talón de Aquiles”: un día, durante un ejercicio de entrenamiento, las máquinas dejaron repentinamente de seguir las órdenes de los operadores. Después de una minuciosa inspección del equipo, no se encontraron daños. Un poco más tarde se descubrió que una línea de alta tensión que pasaba cerca de los ejercicios interfería en la señal de radio. Además, la señal de radio se perdió en el terreno accidentado. Con el comienzo de la Segunda Guerra Mundial, se detuvieron los desarrollos para mejorar los teletanques.
Tras el final de la Segunda Guerra Mundial comenzaron a aparecer robots inteligentes de alta precisión, capaces de analizar, ver, oír, sentir, distinguir determinadas sustancias químicas y realizar análisis químicos del agua o del suelo. En 1948 se creó un vehículo aéreo no tripulado de reconocimiento. Estados Unidos y ya en 1951 se puso en producción en masa un "dron".
En 1979, en la Universidad Técnica N. E. Bauman, por orden del Comité de Seguridad del Estado de la URSS, se fabricó un robot móvil ultraligero para neutralizar objetos explosivos.
Desde principios del siglo XXI, muchos países han aumentado la inversión en el desarrollo de nuevas tecnologías en robótica. Se han desarrollado y se están utilizando robots de reconocimiento (terrestres y submarinos), robots de transporte y robots centinela diseñados para proteger fronteras. Los estadounidenses han desarrollado robots de combate equipados con una ametralladora pesada.
El sistema ruso de armas y misiles antiaéreos autopropulsados también es conocido por las armas producidas en masa.Pantsir-S1 , que puede funcionar en modo automático tanto en una unidad de combate separada como como parte de una unidad de varios vehículos de combate. Los activistas de derechos humanos se oponen a los robots de combate por su posible falta de control. Por ejemplo, pueden matar a oponentes heridos y que se rinden, y tienen dificultades para distinguir a los combatientes enemigos de los civiles).
Robot médico.
En los últimos años, los robots se han utilizado cada vez más en medicina; en particular, se están desarrollando varios modelosrobots quirúrgicos . La primera operación con un robot quirúrgico se realizó en 1992. Desde el año 2000, se produce comercialmente el robot Da Vinci, diseñado paralaparoscópico operaciones e instalado en varios cientos de clínicas en todo el mundo.
Este robot consta de dos bloques, uno está destinado al operador y el segundo, una máquina de cuatro brazos, desempeña el papel de cirujano. Uno de los “brazos” del robot sostiene una cámara de video que transmite una imagen de la zona operada, los otros dos reproducen en tiempo real los movimientos realizados por el cirujano y el cuarto “brazo” actúa como asistente del cirujano. El cirujano se sienta frente al control remoto, que permite ver el área operada en 3D con múltiples aumentos y utiliza joysticks especiales para controlar los instrumentos.
El coste del sistema Da Vinci es de unos 2 millones de dólares estadounidenses. En Rusia hay poco menos de treinta sistemas quirúrgicos de este tipo instalados.
Nanorobot.
Los nanorobots, o nanobots, son robots comparables en tamaño a una molécula, con funciones de movimiento, procesamiento y transmisión de información y ejecución de programas.
Actualmente, los nanorobots se encuentran en la fase de investigación y de creación. Varias conferencias científicas internacionales están dedicadas al desarrollo de componentes de nanodispositivos y nanorobots.
En 2010, se demostraron por primera vez nanorobots basados en ADN capaces de moverse en el espacio.
La primera aplicación útil de las nanomáquinas, si surgen, está prevista en la tecnología médica, donde podrían usarse para identificar y destruir células cancerosas. También pueden detectar sustancias químicas tóxicas en el medio ambiente y medir sus niveles de concentración. Los nanorobots también pueden utilizarse como transportadores para la entrega de medicamentos, instrumentos biomédicos, herramientas de vigilancia y espionaje y armas para la investigación espacial.
Dado que los nanorobots son de tamaño microscópico, es probable que muchos de ellos sean necesarios para trabajar juntos para resolver problemas microscópicos y macroscópicos.
Programa de robots.
Un robot o bot, además de un robot de Internet, www-bot es un programa especial que realiza cualquier acción de forma automática y/o según un cronograma determinado. Cuando se habla de programas informáticos, el término se utiliza principalmente en relación con Internet.
Normalmente, los bots están diseñados para realizar trabajos monótonos y repetitivos, lo más rápido posible (obviamente, mucho más alto que las capacidades humanas).
Conclusión.
Las clasificaciones presentadas en el trabajo no son completas ni exhaustivas, debido a que la robótica es una de las ciencias que se desarrollan dinámicamente y una de las ramas de producción más prometedoras. Y combinados, ofrecerán tipos de robots siempre nuevos, según las necesidades de la vida y la actividad humana.
Los mismos tipos de robots que se analizan en este trabajo se mejoran constantemente con la ayuda de la tecnología. Así, los robots humanoides, los androides, se vuelven capaces de resolver problemas lógicos, adquieren una piel artificial equipada con sensores similares a la memoria táctil humana, que nos permite recordar las sensaciones del tacto incluso después del contacto con objetos.
Se ha inventado un robot que puede desplazarse a lo largo de una pared vertical.Gracias a su diseño, VertiGo es capaz de moverse a lo largo de paredes incluso con superficies irregulares, como las de ladrillo.El dispositivo, de unos 60 centímetros de largo, es una plataforma de cuatro ruedas que cuenta con dos hélices independientes que cambian el ángulo de inclinación. Funcionan de manera similar a los spoilers de los automóviles, creando una fuerza que presiona las ruedas de la estructura contra el piso o la pared. Las hélices cambian el vector de empuje cambiando el ángulo de inclinación, por lo que el robot puede moverse de una superficie horizontal a una vertical.
Sin embargo, a pesar de toda la promesa de la robótica, surgen una serie de problemas al utilizar robots. También se trata de problemas éticos: por ejemplo, el problema del uso de robots militares,el problema de prolongar la vida de las personas en la Tierra mediante la introducción en el cuerpo de robots moleculares que previenen el envejecimiento celular. La robótica -la “ética de la robótica”- está llamada a resolver estos problemas. Este concepto se utiliza para indicar la actitud de la ética específicamente hacia los robots (ya que este concepto está relacionado con el comportamiento humano). Este campo describe cómo las personas diseñan, construyen, usan y se relacionan con robots y otras creaciones artificialmente inteligentes.
En el foro económico de enero en Davos, uno de los funcionariosEsta será la llamada “cuarta revolución tecnológica”. Entre los temas que se tratarán en el foro estará la hipotética participación de robots en las guerras y la sustitución de especialistas de clase media por robots.
El trabajo presentado será mi primer paso hacia el estudio de la robótica, el uso de robots y los problemas de la difusión de la robótica.
Lista de literatura usada:
Bogolyubov A.N., Nikitin D.A. Popular sobre robótica / Rep. ed. ENFERMEDAD VENÉREA. Nóvikov. Kyiv: Nauk, Dumka, 1989. 200 p.
Vasilenko N.B., Nikitin K.D., Ponomarev V.P., Smolin A.Yu. Conceptos básicos de la robótica. /editado por K.D. nikitina– Tomsk: Pop “RASKO”, 1993.
Kobrinsky A.E. Aquí están: robots. M.: Nauka, 1972. 113 p.
Makarov I.M., Topcheev Yu.I. Robótica: historia y perspectivas. - M.:Ciencia ; Editorial MAI, 2003. 349 p.
Otryashenkov Yu. M. Joven cibernético. - Literatura infantil, 1978.
Recursos electrónicos:
http://aviadron.ru/
http://edurobots.ru/
http://geektimes.ru/hub/robot/
http://gizmod.ru/roboty/
https://kantiana.ru/news/143/161510/
http://novate.ru/blogs
http://postnauka.ru/
http://potustorony.ru
Http://roboting.ru/
http://robot-ex.ru
http://robo-hunter.com/
http://techvesti.ru/robot
https://ru.wikipedia.org/wiki/Robotics
https://ru.wikipedia.org/wiki/robot
¿Qué es esto?
Este artículo trata sobre las aplicaciones industriales de la robótica. El uso de robots en la industria comenzó, según estándares históricos, no hace mucho tiempo, hace poco más de medio siglo, pero ahora pocas producciones se pueden imaginar sin líneas automáticas, sin manipuladores de acero y las atentas pupilas de vidrio de los robots: estos hierros. Los muchachos han entrado firmemente en la mayoría de los procesos de producción y no van a salir. A pesar de una distribución tan extensa y casi ubicua de robots, solo los especialistas comprenden completamente toda la gama de sus capacidades. En este artículo abriremos la puerta al mundo de la robótica industrial a un amplio abanico de lectores: describiremos algunos tipos de robots de producción y sus áreas de aplicación. Es imposible abarcar la inmensidad en un solo artículo, pero si los lectores están interesados, definitivamente continuaremos.
Entonces, ¿qué son ellos? ¿Robots?
Existen varias clasificaciones de robots industriales: por tipo de control, por grado de movilidad, por área de aplicación y por las particularidades de las operaciones realizadas.
Por tipo de control:
Robots guiados: requieren que un operador controle cada uno de sus movimientos. Debido al estrecho ámbito de aplicación, no están muy extendidos. Y no exactamente robots.
Autómatas y robots semiautónomos: actúan estrictamente según un programa determinado, muchas veces no tienen sensores y no son capaces de corregir sus acciones, y no pueden prescindir de la participación de un trabajador.
Autónomos: pueden realizar un ciclo programado de acciones sin intervención humana, según algoritmos determinados y ajustando sus acciones según sea necesario. Estos robots son capaces de cubrir completamente el campo de actividad en su sección del transportador, sin involucrar mano de obra humana.
Por función y alcance:
Los robots se dividen según su propósito y funciones, estos son solo algunos de ellos: los robots industriales son universales, de soldadura, de construcción de maquinaria, de corte, de recolección, de ensamblaje, de embalaje, de almacén y de pintura.
Esta no es una lista completa: la cantidad lo es todo opciones posibles está en constante crecimiento y es imposible enumerarlo todo en un solo artículo. Sólo podemos decir con seguridad que apenas existe un área de la actividad humana en la que los robots no puedan hacer que el trabajo humano sea más creativo asumiendo toda la parte monótona y peligrosa del trabajo.
Otros métodos de clasificación
Cada enciclopedia, cada libro de referencia y cada fabricante tiene su propia clasificación y tipología de robots. Lo cual no es sorprendente: a menudo está determinado por las necesidades muy específicas y el enfoque privado de la persona que lo compone.
¿Esto nos impedirá observar algunas muestras y comprender lo que pueden hacer? No. Empecemos.
Veamos las muestras.
Entre los robots industriales, son ampliamente conocidos los productos de empresas como Kuka, Fanuc y Universal Robots, de los cuales veremos algunos ejemplos a continuación.
El enfoque de Stratasys, que ha creado un nuevo tipo de dispositivo industrial: un híbrido de robot e impresora 3D, parece muy interesante. Por supuesto, cualquier impresora 3D tiene las características de un robot, pero aquí se trata de un robot completamente tradicional. Manipulador, que también tiene una función de impresión FDM. El demostrador 3D Stratasys Infinite-Build está destinado principalmente a la producción aeronáutica y espacial, donde su capacidad para imprimir en superficies verticales de área ilimitada es tan importante, de acuerdo con el concepto de "construcción infinita". Al trabajo en el proyecto se asocian monstruos como el gigante aeroespacial Boeing y el fabricante de automóviles Ford, que proporcionaron a Stratasys especificaciones para las características necesarias de los productos resultantes: el mecanismo manipulador de ocho ejes y la abundancia de materiales compuestos especialmente desarrollados para la impresión. , mano de obra tradicionalmente de alta calidad: todo nos dice que este dispositivo y sus descendientes tienen un gran futuro. Sistemas 3D - Figura 4
La Figura 4 de 3D Systems es un sistema robótico modular para automatizar la impresión 3D estereolitográfica, nada más y nada menos.
Se trata de un complejo automático completo que es capaz de producir nuevos productos cada pocos minutos, a diferencia de las varias horas que tardan las impresoras SLS convencionales.
Además, el ciclo ya incluye etapas como el lavado, la separación de soportes y la iluminación adicional, y no solo la exposición primaria. La Figura 4 hace todo esto por sí sola, sin la intervención del operador en el proceso de trabajo. Gracias a la modularidad, basada en la Figura 4, es posible crear líneas automáticas bastante grandes utilizando componentes estándar.
Este complejo se presentó al público este año en el Salón Dental Internacional de Colonia, así como la nueva impresora 3D ProJet CJP 260Plus, una impresora 3D a todo color diseñada para el modelado anatómico de dispositivos médicos y la creación rápida de prototipos de cualquier diseño industrial. La impresora también es robótica: está equipada con un sistema para cargar, retirar y reciclar automáticamente el polvo de impresión. Se puede decir con confianza que un enfoque integrado de la impresión 3D es parte de la cultura de producción del futuro. Proporcionará una combinación radicalmente nueva de velocidad, precisión, conveniencia y reducción de costos.
Carbono - Carbono SpeedCell
Carbon SpeedCell es una solución tecnológica de Carbon que incluye la nueva impresora 3D The M2 CLIP y el Smart Part Washing.
CLIP es una tecnología de impresión estereolitográfica sin capas que proporciona velocidades de 25 a 100 veces más rápidas que el SLS convencional y un nuevo nivel de calidad de superficie. El sistema CLIP (Continuous Liquid Interface Production) le permite obtener formas de productos que antes eran imposibles y requieren un posprocesamiento mínimo. El fabricante aún no ha proporcionado las características exactas del complejo de hardware, pero el enfoque en sí ya es satisfactorio: es una solución casi lista para cualquier taller que requiera impresión estereolitográfica.
DMG MORI - LASERTEC 65 modelo 3d
El dispositivo combina varios enfoques diferentes para el procesamiento de piezas: se trata de una fresadora clásica con control de programa, de cinco ejes y muy precisa, y una herramienta de corte láser con los mismos grados de libertad, y una impresora de impresión de metales 3D con tecnología de deposición láser. Es difícil imaginar una operación que esta máquina no pudiera realizar con una pieza metálica. Enfoque híbrido: fresado de la pieza, fusión de piezas faltantes o impresión desde cero y acabado: todas las operaciones se pueden realizar en la pieza con un solo enfoque, dentro del marco de un programa específico, sin interrumpir el ciclo tecnológico. El tamaño de la pieza procesada y/o impresa es de hasta 600 por 400 mm, y el peso puede ser de hasta 600 kg. Una impresora multifunción de este tipo para trabajar en metal ya ha cambiado mucho en la cultura de la producción de piezas y piezas pequeñas. productos a escala, y en un futuro próximo un enfoque similar puede extenderse a la producción en serie.
EOS - Fabricación Aditiva
EOS ha creado manipuladores que son capaces de realizar diversas operaciones que requieren agarrar y mover una pieza. Los desarrollos de EOS en este ámbito se basan en observaciones del comportamiento animal, en particular: este manipulador se basa en el ejemplo de la trompa de un elefante. Un brazo robótico de este tipo se puede utilizar en una variedad de operaciones industriales, como por ejemplo: en transporte y embalaje. en el traslado de piezas de un área de trabajo a otra, por ejemplo, de una impresora 3D a una cámara de posprocesamiento, para eliminar la participación humana en esta etapa.
Así es como funciona: la empresa también patrocina y presenta el proyecto Roboy, un robot humanoide móvil capaz de realizar cualquier movimiento característico de una persona y actuar como asistente en la producción.
Concept Laser y Swisslog - M Line Factory
Concept Laser, un conocido fabricante de impresoras 3D de metal, ha firmado un acuerdo con Swisslog. Su proyecto común es M Line Factory, un sistema para mover piezas metálicas impresas en 3D entre máquinas Concept Laser utilizando robots Swisslog. Las empresas continúan mejorando. Sistemas de hardware para impresión 3D de metal. Los componentes robóticos de estas máquinas son capaces de llevar una pieza a lo largo de todo el ciclo, desde cargar el diseño en la memoria hasta la entrega del producto terminado al almacén, sin necesidad de intervención del operador.
Industrias de aditivos: MetalFAB1 La única instalación de este tipo es un sistema único para imprimir, transportar desde la cámara de trabajo y almacenar piezas terminadas. De hecho, se trata de un taller de impresión 3D de metal ya preparado en un mismo edificio. Hay robots que son capaces de realizar las funciones de máquinas de soldar y fresadoras con control de programa, y también aquellos que dan servicio a las fresadoras CNC tradicionales, aumentando su productividad. Así lo afronta el mencionado anteriormente Sawyer: Conclusiones:
Los robots están por todas partes en la industria moderna. Están en cualquier taller y en cualquier zona de producción. Y esto es normal: los robots ahorran dinero a los empleadores y los trabajadores se salvan de un trabajo dañino, monótono y adormecedor; los robots trabajan las 24 horas del día y sin parar; Los robots son mucho más precisos que los trabajadores vivos: no se cansan, sus ojos no se vuelven borrosos, sus sensores y sistemas de posicionamiento son capaces de mantener una precisión de hasta centésimas de milímetro.
Todavía no los vemos en todas partes: muchos procesos de producción están ocultos para el usuario medio y no suelen ser especialmente interesantes, pero muy pronto será imposible no darse cuenta de que la inmensa mayoría de todos los bienes materiales son producidos por máquinas inteligentes. .
¿Quieres más noticias interesantes del mundo de la tecnología 3D?



