Co je stejnosměrný motor. Co je to bezkomutátorový stejnosměrný motor a princip jeho práce
DC motory určené k přeměně energie stejnosměrného proudu na mechanickou práci.
Stejnosměrné motory jsou mnohem méně běžné než střídavé motory. To je primárně způsobeno srovnatelně vysokou cenou, složitějším zařízením a potížemi při poskytování energie. Ale i přes všechny tyto nevýhody má DBT mnoho výhod. Například střídavé motory je obtížné regulovat, ale DFC jsou dokonale regulovány různými způsoby. Kromě toho mají DFC pevnější mechanické vlastnosti a mohou poskytovat vysoký rozběhový moment.
Stejnosměrné elektromotory se používají jako trakční motory, v elektrické dopravě a jako různé akční členy.
Konstrukce stejnosměrných motorů
Konstrukce stejnosměrného motoru je podobná střídavému motoru, ale stále existují značné rozdíly. Na rámu 7, který je vyroben z oceli, je instalováno budicí vinutí ve formě cívek 6. Mezi hlavními póly lze instalovat další póly 5 pro zlepšení vlastností DFC. Uvnitř je instalována kotva 4, která se skládá z jádra a kolektoru 2 a je instalována pomocí ložisek 1 ve skříni motoru. Komutátor je podstatný rozdíl od střídavých motorů. Je napojen na kartáče 3, což umožňuje napájet nebo naopak odebírat napětí z obvodu kotvy v generátorech.
Princip fungování

Princip činnosti DPT je založen na interakci magnetických polí budícího vinutí a kotvy. Můžete si představit, že místo kotvy máme rám, kterým protéká proud, a místo budícího vinutí permanentní magnet s póly N a S. Když rámem protéká stejnosměrný proud, magnetické pole permanentního magnetu se začne měnit. působí na něj, to znamená, že se rám začne otáčet, a protože se směr proudu nemění, směr otáčení rámu zůstává stejný.
Po přivedení napětí na svorky motoru začne ve vinutí kotvy protékat proud a jak již víme, začne na něj působit magnetické pole stroje, zatímco kotva se začne otáčet, a jelikož se kotva otáčí v magnetické pole, začne se tvořit EMP. Toto EMF je namířeno proti proudu, proto se nazývá zpět EMF. Lze to zjistit pomocí vzorce
Kde Ф je budicí magnetický tok, n je frekvence otáčení a Ce je návrhový moment stroje, který pro něj zůstává konstantní.
Napětí na svorkách je větší než zadní EMF o hodnotu úbytku napětí v obvodu kotvy.
![]()
A pokud tento výraz vynásobíme proudem, dostaneme rovnici bilance výkonu.
![]()
Bez ohledu na konstrukci je jakýkoli elektromotor navržen stejně: uvnitř válcové drážky ve stacionárním vinutí (statoru) se otáčí rotor, ve kterém je vybuzeno magnetické pole, které vede k odpuzování jeho pólů od statoru.
Udržení konstantního odpuzování vyžaduje buď rekomuci vinutí rotoru, jako je tomu u kartáčovaných elektromotorů, nebo vytvoření rotujícího magnetického pole v samotném statoru (klasickým příkladem je asynchronní třífázový motor).
Typy elektromotorů a jejich vlastnosti
Účinnost a spolehlivost zařízení přímo závisí na elektromotoru, takže jeho výběr vyžaduje seriózní přístup.
Pomocí elektromotoru se elektrická energie přeměňuje na mechanickou energii. Výkon, otáčky za minutu, napětí a typ napájení jsou hlavními ukazateli elektromotorů. Velmi důležité jsou také ukazatele hmotnosti, velikosti a energie.
Elektromotory mají velké výhody. Elektromotory jsou tedy ve srovnání s tepelnými motory srovnatelného výkonu mnohem kompaktnější. Jsou perfektní pro instalaci na malých plochách, například ve vybavení tramvají, elektrických lokomotiv a na obráběcích strojích pro různé účely.
Při jejich používání se neuvolňuje pára ani produkty rozkladu, což zajišťuje šetrnost k životnímu prostředí. Elektromotory se dělí na stejnosměrné a střídavé motory, krokové motory, servomotory a lineární motory.
Střídavé elektromotory se zase dělí na synchronní a asynchronní.
- DC motory
Používají se k vytváření nastavitelných elektrických pohonů s vysokými dynamickými a výkonnostními ukazateli. Tyto indikátory zahrnují vysokou rovnoměrnost rotace a schopnost přebíjení. Používají se ke kompletaci papírenských, barvicích a dokončovacích strojů a strojů pro manipulaci s materiálem, pro polymerní zařízení, vrtné soupravy a pomocné jednotky rypadel. Často se používají k vybavení všech typů elektrických vozidel.
Je po nich vyšší poptávka než po stejnosměrných motorech. Často se používají v každodenním životě a v průmyslu. Jejich výroba je mnohem levnější, konstrukce je jednodušší a spolehlivější a obsluha vcelku jednoduchá. Téměř všechny domácí spotřebiče jsou vybaveny střídavými motory. Používají se v pračkách, kuchyňských digestořích atd. Ve velkých průmyslových odvětvích se používají k pohonu obráběcích strojů, navijáků pro přesun těžkých břemen, kompresorů, hydraulických a pneumatických čerpadel a průmyslových ventilátorů.- Krokové motory
Fungují na principu přeměny elektrických impulsů na mechanický pohyb diskrétní povahy. Je jimi vybavena většina kancelářské a výpočetní techniky. Takové motory jsou velmi malé, ale vysoce produktivní. Někdy jsou v určitých odvětvích žádané. - Servomotory
Týká se stejnosměrných motorů. Jsou high-tech. Jejich práce se provádí pomocí negativní zpětné vazby. Takový motor je obzvláště výkonný a je schopen vyvinout vysokou rychlost otáčení hřídele, která se nastavuje pomocí počítačového softwaru. Díky této funkci je oblíbená při vybavování výrobních linek a moderních průmyslových strojů. - Lineární motory
Mají jedinečnou schopnost přímočarého pohybu rotoru a statoru vůči sobě navzájem. Takové motory jsou nepostradatelné pro činnost mechanismů, jejichž činnost je založena na dopředném a vratném pohybu pracovních orgánů. Použití lineárního elektromotoru může zvýšit spolehlivost a účinnost mechanismu díky tomu, že výrazně zjednodušuje jeho obsluhu a téměř zcela eliminuje mechanický převod. - Synchronní motory
Jedná se o typ střídavých elektromotorů. Frekvence otáčení jejich rotoru se rovná frekvenci otáčení magnetického pole ve vzduchové mezeře. Používají se pro kompresory, velké ventilátory, čerpadla a stejnosměrné generátory, protože pracují při konstantní rychlosti. - Asynchronní motory
Také patří do kategorie střídavých elektromotorů. Rychlost otáčení jejich rotoru se liší od frekvence otáčení magnetického pole, které je vytvářeno proudem ve vinutí statoru. Asynchronní motory se v závislosti na konstrukci rotoru dělí na dva typy: klec nakrátko a vinutý rotor. Konstrukce statoru je u obou typů stejná, rozdíl je pouze ve vinutí.
Elektromotory jsou v moderním světě nepostradatelné. Díky nim je lidem velmi usnadněna práce. Jejich používání pomáhá snižovat náklady na lidskou energii a činí každodenní život mnohem pohodlnějším.
Označení řady motoru:
- AIR, A, 4A, 5A, AD, 7АVER - všeobecné průmyslové elektromotory s regulací výkonu podle GOST 51689-2000
- AIS, 6A, IMM, RA, AIS - všeobecné průmyslové elektromotory s výkonovou vazbou dle evropské normy DIN (CENELEC)
- AIM, AIML, 4VR, VA, AV, VAO2, 1VAO, 3V - nevýbušné elektromotory
- AIU, VRP, AVR, 3AVR, VR - nevýbušné důlní elektromotory
- A4, DAZO4, AOM, DAV, AO4 - vysokonapěťové elektromotory
Známka úpravy elektromotoru:
- M - modernizovaný elektromotor (například: ADM63A2U3)
- K - elektromotor s vinutým rotorem (například: 5ANK280A6)
- X - elektromotor v hliníkovém rámu (například: 5AMH180M2U3)
- E - jednofázový elektromotor 220V (například: AIRE80S2U3)
- N - chráněný elektromotor s vlastní ventilací (například: 5AN200M2U3)
- F - chráněný elektromotor s nuceným chlazením (například: 5AF180M2U3)
- C - elektromotor se zvýšeným prokluzem (například: AIRS180M4U3)
- B - vestavěný elektromotor (například: ADMV63V2U3)
- R - elektromotor se zvýšeným rozběhovým momentem (například: AIRR180S4U3)
- P - elektromotor pro pohon ventilátorů v drůbežích farmách ("drůbežárna") (například: AIRP80A6U2)
Všeobecně uznávaný klimatický design GOST platí pro všechny typy strojů, přístrojů, elektromotorů a dalších technických výrobků. Úplné vysvětlení označení je uvedeno níže.
Písmeno označuje klimatickou zónu
- U - mírné klima;
- T – tropické klima;
- CL - chladné klima;
- M – mořské mírně chladné klima;
- О - obecná klimatická verze (kromě mořské);
- OM - obecná klimatická námořní verze;
- B - celoklimatická verze.
- 1 - venku;
- 2 - pod přístřeškem nebo uvnitř, kde jsou podmínky stejné jako venku, s výjimkou slunečního záření;
- 3 - uvnitř bez umělé regulace klimatických podmínek;
- 4 - vnitřní s umělou regulací klimatických podmínek (větrání, vytápění);
- 5 - v místnostech s vysokou vlhkostí, bez umělé regulace klimatických podmínek
Podle druhu provozu se tyto motory dělí na:
- synchronní motory;
- asynchronní motory;
Podle počtu fází jsou motory:
- jednofázový
- dvoufázový
- třífázový
Zásadní rozdíl je v tom, že u synchronních strojů se 1. harmonická magnetomotorické síly statoru pohybuje s rychlostí otáčení rotoru (proto se rotor sám otáčí rychlostí otáčení magnetického pole ve statoru), zatímco u asynchronních strojů je a zůstává rozdíl mezi rychlostí otáčení rotoru a rychlostí otáčení magnetického pole ve statoru (pole se točí rychleji než rotor).
Rotor takového elektromotoru je kovový válec, do jehož drážek jsou pod úhlem k ose otáčení nalisovány nebo nality vodivé vodiče a na koncích rotoru jsou spojeny kroužky v jeden celek. Střídavé magnetické pole statoru vybudí v rotoru protiproud, který připomíná veverku, a podle toho i magnetické pole, které jej od statoru odpuzuje.
V závislosti na počtu statorových vinutí může být asynchronní motor:
- Jednofázové- v tomto případě je hlavní nevýhodou motoru nemožnost nastartovat sama o sobě, protože vektor odpudivé síly prochází striktně osou otáčení. Aby mohl motor začít pracovat, vyžaduje buď startovací tlak, nebo zahrnutí samostatného startovacího vinutí, což vytváří dodatečný moment síly, který posouvá jejich celkový vektor vzhledem k ose kotvy.
- Dvoufázový elektromotor má dvě vinutí, ve kterých jsou fáze posunuty o úhel odpovídající geometrickému úhlu mezi vinutími. V tomto případě vzniká v elektromotoru tzv. točivé magnetické pole (pokles intenzity pole v pólech jednoho vinutí probíhá synchronně s jeho nárůstem ve druhém). Takový motor se stává schopným samovolného nastartování, ale má potíže se couváním. Protože moderní napájení nepoužívá dvoufázové sítě, elektromotory tohoto druhu se ve skutečnosti používají v jednofázových sítích s druhou fází připojenou přes prvek fázového posunu (obvykle kondenzátor).
- Třífázový asynchronní elektromotor- nejpokročilejší typ asynchronního motoru, protože je možné snadno reverzovat - změna pořadí zapnutí fázových vinutí mění směr otáčení magnetického pole, a tedy i rotoru.
Střídavé komutátorové motory se používají v případech, kdy jsou vyžadovány vysoké otáčky (asynchronní elektromotory nemohou překročit rychlost otáčení magnetického toku ve statoru - pro průmyslovou síť 50 Hz je to 3000 ot./min.). Kromě toho mají výhodu v rozběhovém momentu (zde je úměrný proudu, nikoli otáčkám) a mají nižší rozběhový proud, menší přetěžování elektrické sítě při rozběhu. Usnadňují také ovládání rychlosti.
Nevýhodou těchto výhod je vysoká cena (vyžaduje výrobu rotoru s naskládaným jádrem, několika vinutími a kolektorem, což se také obtížněji vyvažuje) a kratší životnost. Kromě nutnosti pravidelné výměny nositelných kartáčků se časem opotřebovává i samotný komutátor.
Synchronní elektromotor má tu zvláštnost, že magnetické pole rotoru není indukováno magnetickým polem statoru, ale jeho vlastním vinutím připojeným k samostatnému zdroji stejnosměrného proudu. Díky tomu se jeho frekvence otáčení rovná frekvenci otáčení magnetického pole statoru, odkud pochází termín „synchronní“.
Střídavý synchronní motor je stejně jako stejnosměrný motor reverzibilní: když je na stator přivedeno napětí, funguje jako elektromotor, když se otočí z vnějšího zdroje, sám začne budit střídavý proud ve fázových vinutích; Hlavní oblastí použití synchronních elektromotorů jsou vysokovýkonové pohony. Zde znamená zvýšení účinnosti oproti asynchronním elektromotorům výrazné snížení ztrát elektrické energie.
Synchronní motory se také používají v elektrických vozidlech. Pro řízení rychlosti jsou však v tomto případě nutné výkonné frekvenční měniče, ale při brzdění lze energii vracet zpět do sítě.

Protože stejnosměrný proud není schopen vytvářet měnící se magnetické pole, zajištění kontinuálního otáčení rotoru vyžaduje nucenou rekomuci vinutí nebo diskrétní změnu směru magnetického pole.
Nejstarší známou metodou je použití elektromechanického komutátoru. Kotva elektromotoru má v tomto případě několik vícesměrných vinutí napojených na lamely komutátoru umístěné v příslušné poloze vůči kartáčům. V okamžiku zapnutí napájení dojde ve vinutí připojeném ke kartáčům k pulzu, po kterém se rotor otáčí a na stejném místě vzhledem k pólům statoru se zapne nové vinutí.
Protože se magnetizace statoru při provozu stejnosměrného komutátorového motoru nemění, lze místo jádra s vinutím použít výkonné permanentní magnety, díky nimž bude motor kompaktnější a lehčí.
Tyto motory s jednotkou kartáčového komutátoru jsou:
- Kolektor- elektrické zařízení, ve kterém jsou snímač polohy rotoru a proudový spínač ve vinutí totéž zařízení - jednotka kartáč-sběrač.
- Bezkartáčový- uzavřený elektromechanický systém sestávající ze synchronního zařízení se sinusovým rozložením magnetického pole v mezeře, snímače polohy rotoru, převodníku souřadnic a výkonového zesilovače. Dražší varianta ve srovnání s kartáčovanými motory.
Komutátorový motor není bez řady nevýhod. Tento:
- vysoká úroveň rušení přenášeného do napájecí sítě při spínání vinutí kotvy a buzení jiskřícími kartáči;
- nevyhnutelné opotřebení komutátoru a kartáčů;
- zvýšený hluk během provozu.
Moderní výkonová elektronika umožnila zbavit se těchto nedostatků použitím tzv. krokového motoru - v něm má rotor permanentní magnetizaci a externí zařízení postupně mění směr proudu v několika statorových vinutích. Ve skutečnosti se při jediném proudovém impulsu rotor otočí pod pevným úhlem (krokem), odkud pochází i název elektromotorů tohoto typu.
Krokové motory jsou tiché a také vám umožňují nastavit točivý moment (amplitudu impulsu) i rychlost (frekvenci) v nejširším rozsahu a lze je také snadno obrátit změnou pořadí signálů. Z tohoto důvodu jsou široce používány v servomotorech a automatizaci, ale jejich maximální výkon je dán schopnostmi obvodu řízení výkonu, bez kterého jsou krokové motory nefunkční.
Jednofázový asynchronní elektromotor
Zařízení je asynchronní elektromotor, ve kterém má stator pouze jedno pracovní vinutí. Zařízení je určeno pro připojení k jednofázové síti střídavého proudu. Jednotka slouží ke kompletaci pohonných systémů pro průmyslové a domácí spotřebiče malých výkonů - čerpadla, obráběcí stroje, mlýnky, odšťavňovače, mlýnky na maso, ventilátory, kompresory atd.
Výhody tohoto zařízení:
- jednoduchý design;
- ekonomická spotřeba elektřiny;
- všestrannost (jednofázový elektromotor se používá v mnoha průmyslových oblastech);
- přijatelná úroveň vibrací a hluku během provozu;
- zvýšená životnost;
- odolnost vůči různým typům přetížení.
Samostatnou výhodou jednofázových elektromotorů těchto výrobců je možnost připojení jednotky k síti 220 Voltů. Díky tomu lze zařízení využít nejen ve výrobě, ale také při řešení každodenních problémů v domácnosti. Prezentované jednofázové asynchronní elektromotory se snadno připojují a nevyžadují zvláštní údržbu
Třífázový asynchronní elektromotor
Jednotkou je asynchronní střídavý motor skládající se z rotoru a statoru se třemi vinutími. Zařízení je určeno pro připojení do třífázové sítě střídavého proudu. Tento asynchronní elektromotor našel široké uplatnění v průmyslu: často se používá pro kompletaci výkonných zařízení, jako jsou kompresory, drtiče, mlýny a odstředivky. Kromě toho je jednotka součástí konstrukce mnoha automatizačních a telemechanických zařízení, lékařských zařízení a také různých strojů a pil určených pro použití v domácích podmínkách.
Mezi výhody prezentovaných zařízení je třeba poznamenat:
- vysoká úroveň účinnosti a produktivity;
- všestrannost (třífázový asynchronní elektromotor se používá v různých oblastech činnosti);
- nízká úroveň vibrací a hluku během provozu;
- lehké, ale zároveň spolehlivé a odolné tělo;
- dodržování přísných požadavků evropských norem kvality.
Třífázové asynchronní elektromotory se navíc vyznačují snadnou instalací a dlouhou životností. Za zmínku stojí, že na modely některých výrobců je možné na přání zákazníka instalovat další moduly. Například třífázové elektromotory řady BN mohou být vybaveny systémem nuceného chlazení, který zajišťuje správný a efektivní provoz jednotky při nízkých otáčkách.
mirprivoda.ru, eltechbook.ru
První ze všech točivých elektrických strojů vynalezených v 19. století je stejnosměrný motor. Jeho princip fungování je znám již od poloviny minulého století a dodnes stejnosměrné motory (DCM) nadále věrně slouží lidem a pohánějí mnoho užitečných strojů a mechanismů.
První DBT
Od 30. let 19. století prošly ve svém vývoji několika etapami. Faktem je, že než se koncem minulého století objevila strojní síla, jediným zdrojem elektřiny byl galvanický článek. Proto všechny první elektromotory mohly fungovat pouze na stejnosměrný proud.
Jaký byl první stejnosměrný motor? Princip činnosti a konstrukce motorů vyrobených v první polovině 19. století byly následující. Induktor s vyčnívajícím pólem byl soubor pevných permanentních magnetů nebo tyčových elektromagnetů, které neměly společný uzavřený magnetický obvod. Vyčnívající pólová kotva byla tvořena několika samostatnými tyčovými elektromagnety na společné ose, poháněnými do rotace silami odpuzování a přitahování k pólům induktoru. Jejich typickými představiteli byly motory U. Ricciho (1833) a B. Jacobiho (1834), vybavené mechanickými proudovými komutátory v elektromagnetech kotvy s pohyblivými kontakty v obvodu vinutí kotvy.
Jak fungoval motor Jacobi
Jaký byl princip fungování tohoto stroje? DC motor Jacobi a jeho analogy měly pulzující elektromagnetický točivý moment. Během doby přiblížení opačných pólů kotvy a induktoru vlivem magnetické síly přitažlivosti dosáhl točivý moment motoru rychle svého maxima. Poté, když byly póly kotvy umístěny proti pólům induktoru, mechanický komutátor přerušil proud v elektromagnetech kotvy. Okamžik klesl na nulu. Póly kotvy vlivem setrvačnosti kotvy a hnaného mechanismu vycházely zpod pólů induktoru, v tuto chvíli jim byl z komutátoru přiváděn proud opačného směru, jejich polarita se také změnila na naproti a síla přitažlivosti k nejbližšímu pólu induktoru byla nahrazena silou odpudivou. Tak se Jacobiho motor otáčel v postupných tahech.
Objeví se prstencová kotva
V tyčových elektromagnetech kotvy Jacobiho motoru se periodicky vypínal proud, mizelo jimi vytvořené magnetické pole a jeho energie se přeměňovala na tepelné ztráty ve vinutích. Přerušovaně tak docházelo k elektromechanické přeměně elektřiny ze zdroje proudu kotvy (galvanického článku) na mechanickou energii. Potřebný byl motor s průběžným uzavřeným vinutím, ve kterém by po celou dobu jeho provozu neustále protékal proud.
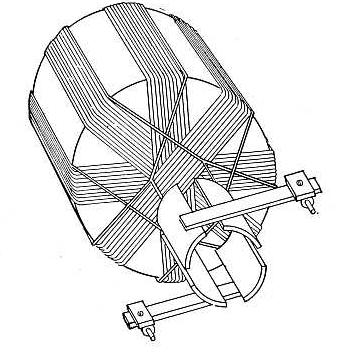
A takový fuhtufn vytvořil v roce 1860 A. Pacinotti. Jak se jeho stejnosměrný motor lišil od svých předchůdců? Princip činnosti a konstrukce motoru Pacinotti jsou následující. Jako kotvu použil ocelový prstenec s paprsky namontovaný na svislé hřídeli. Kotva přitom neměla jasně definované kůly. Stal se nevýrazným.
Mezi paprsky prstence byly navinuty cívky vinutí kotvy, jejichž konce byly zapojeny do série na samotné kotvě, a ze spojovacích bodů každé dvou cívek byly vyrobeny kohouty připevněné ke kolektorovým deskám umístěným podél kruh ve spodní části hřídele motoru, jehož počet se rovnal počtu cívek. Celé vinutí kotvy bylo uzavřeno samo do sebe a po sobě jdoucí spojovací body jeho cívek byly připevněny k sousedním kolektorovým deskám, po nichž klouzala dvojice válců s proudem.
Kruhová kotva byla umístěna mezi póly dvou stacionárních elektromagnetů induktor-stator, takže jimi vytvořené siločáry budícího magnetického pole vstupovaly do vnější válcové plochy kotvy motoru pod severním budicím pólem, procházely po prstenci. armatura, aniž by se přesunula do svého vnitřního otvoru, a vyšla pod jižní pól.

Jak fungoval Pacinottiho motor
Jaký byl jeho princip fungování? Pacinottiho stejnosměrný motor fungoval přesně jako moderní stejnosměrné motory.
V magnetickém poli pólu induktoru s danou polaritou byl vždy určitý počet vodičů vinutí kotvy s proudem konstantního směru a směr proudu kotvy pod různými póly induktoru byl opačný. Toho bylo dosaženo umístěním válečků s proudem, působících jako kartáče, do prostoru mezi póly induktoru. Okamžitý proud kotvy proto tekl do vinutí válečkem, kolektorovou deskou a s ní spojeným kohoutkem, který se také nacházel v prostoru mezi póly, pak tekl v opačných směrech podél dvou polovinutých větví a nakonec vytékal kohoutkem, sběrnou deskou a válečkem v druhém mezipólu mezi nimi. Zároveň se změnily samotné cívky kotvy pod póly induktoru, které však zůstaly nezměněny.
Na každý vodič cívky kotvy s proudem, umístěný v magnetickém poli pólu induktoru, působila síla, jejíž směr určuje známé pravidlo „levé ruky“. Tato síla vzhledem k ose motoru vytvořila točivý moment a součet momentů ze všech těchto sil dává celkový točivý moment DMF, který je téměř konstantní i s několika kolektorovými deskami.
DPT s kroužkovou kotvou a Gramovým vinutím
Jak se často v historii vědy a techniky stávalo, vynález A. Pacinottiho nenašel uplatnění. Na 10 let byla zapomenuta, až ji v roce 1870 samostatně zopakoval francouzsko-německý vynálezce Z. Gramm v podobném provedení U těchto strojů byla osa otáčení již vodorovná, byly použity uhlíkové kartáče posuvné po deskách komutátoru. téměř moderní design. V 70. letech 19. století se již stal známým princip reverzibility elektrických strojů a Gramův stroj se používal jako generátor a stejnosměrný motor. Jeho princip fungování byl již popsán výše.
Navzdory tomu, že vynález prstencové armatury byl důležitým krokem ve vývoji DPT, mělo její vinutí (nazývané Gramovo vinutí) značnou nevýhodu. V magnetickém poli pólů induktoru byly pouze ty jeho vodiče (nazývané aktivní), které ležely pod těmito póly na vnějším válcovém povrchu kotvy. Právě na ně byly aplikovány magnetické, vytvářející točivý moment vzhledem k ose motoru. Na vzniku momentu se nepodílely tytéž neaktivní vodiče, které prošly otvorem v prstencové kotvě. Pouze zbytečně odváděly elektřinu v podobě tepelných ztrát.

Od prstencové armatury po bubnovou armaturu
Slavnému německému elektroinženýrovi F. Geffner-Alteneckovi se v roce 1873 podařilo tuto nevýhodu prstencové armatury odstranit. Jak fungoval jeho stejnosměrný motor? Princip činnosti a konstrukce jeho induktor-stator jsou stejné jako u motoru s prstencovým vinutím. Změnila se ale konstrukce kotvy a jejího vinutí.
Gefner-Altenek si všiml, že směr proudu kotvy tekoucího ze stacionárních kartáčů ve vodičích Gramova vinutí pod sousedními budicími póly je vždy opačný, tzn. mohou být zahrnuty do závitů cívky umístěné na vnější válcové ploše o šířce (rozteči) rovnající se pólovému dělení (část obvodu kotvy na jeden budicí pól).
V tomto případě se otvor v prstencové armatuře stane zbytečným a změní se v pevný válec (buben). Toto vinutí a samotná kotva se nazývají bubnová vinutí. Spotřeba mědi v něm se stejným počtem aktivních vodičů je mnohem menší než v Gramově vinutí.
Kotva je zubatá
U strojů Gram a Gefner-Altenek byl povrch kotvy hladký a vodiče jejího vinutí byly umístěny v mezeře mezi ní a póly induktoru. V tomto případě dosahovala vzdálenost mezi konkávní válcovou plochou budícího pólu a konvexní plochou kotvy několika milimetrů. Proto pro vytvoření požadované velikosti magnetického pole bylo nutné použít budicí cívky s velkou magnetomotorickou silou (s velkým počtem závitů). Tím se výrazně zvýšila velikost a hmotnost motorů. Navíc bylo obtížné připevnit cívky k hladkému povrchu kotvy. Ale co můžeme dělat? Aby vodič působil na vodič s proudem Ampér, musí se totiž nacházet v bodech prostoru s velkým magnetickým polem (s velkou magnetickou indukcí).
Ukázalo se, že to není nutné. Americký vynálezce kulometu H. Maxim ukázal, že pokud je bubnová kotva ozubená a cívky bubnového vinutí jsou umístěny v drážkách vytvořených mezi zuby, pak lze mezeru mezi ní a budicími póly zmenšit na zlomky o milimetr. To umožnilo výrazně zmenšit velikost budicích cívek, ale točivý moment stejnosměrného motoru se vůbec nezmenšil.
Jak takový stejnosměrný motor funguje? Princip činnosti je založen na tom, že u kotvy ozubeného kola nepůsobí magnetická síla na vodiče v jejích drážkách (není v nich prakticky žádné magnetické pole), ale na samotné zuby. V tomto případě je pro vznik této síly rozhodující přítomnost proudu ve vodiči v drážce.
Jak se zbavit vířivých proudů
Další důležité vylepšení provedl slavný vynálezce T. Edison. Co přidal do stejnosměrného motoru? Princip fungování zůstal nezměněn, ale změnil se materiál, ze kterého je jeho kotva vyrobena. Namísto předchozího masivního se stal laminovaný z tenkých ocelových plechů navzájem elektricky izolovaných. To umožnilo snížit množství vířivých proudů (Foucaultových proudů) v kotvě, což zvýšilo účinnost motoru.

Princip činnosti stejnosměrného motoru
Stručně to lze formulovat následovně: při připojení vinutí kotvy buzeného motoru ke zdroji energie v něm vzniká velký proud, nazývaný rozběhový proud a několikanásobně převyšující svou jmenovitou hodnotu. Navíc pod budicími póly opačné polarity je směr proudů ve vodičích vinutí kotvy také opačný, jak je znázorněno na obrázku níže. Podle těchto vodičů působí ampérové síly proti směru hodinových ručiček a tahají kotvu do rotace. V tomto případě se ve vodičích vinutí kotvy indukuje směrové napětí z napájecího zdroje. Jak se kotva zrychluje, zvyšuje se také zpětné EMF v jejím vinutí. V souladu s tím klesá proud kotvy z počátečního proudu na hodnotu odpovídající pracovnímu bodu na charakteristice motoru.

Chcete-li zvýšit rychlost otáčení kotvy, musíte buď zvýšit proud v jejím vinutí, nebo snížit zpětný EMF v něm. Toho lze dosáhnout snížením velikosti budícího magnetického pole snížením proudu v budícím vinutí. Tento způsob řízení rychlosti DPT se rozšířil.
Princip činnosti samostatně buzeného stejnosměrného motoru
Připojením svorek budícího vinutí (OB) k samostatnému zdroji energie (nezávislý OB) se obvykle vyrábí výkonné DFC pro pohodlnější regulaci hodnoty budícího proudu (za účelem změny rychlosti otáčení). DFC s nezávislým OV jsou svými vlastnostmi téměř podobné DFC s OV, zapojeným paralelně k vinutí kotvy.
Paralelní buzení DBT
Princip činnosti stejnosměrného motoru s paralelním buzením je určen jeho mechanickými vlastnostmi, tzn. závislost rychlosti otáčení na zatěžovacím momentu na jeho hřídeli. U takového motoru se změna otáček při přechodu z volnoběhu na jmenovitý zatěžovací moment pohybuje od 2 do 10 %. Takové mechanické vlastnosti se nazývají tuhé.

Princip činnosti stejnosměrného motoru s paralelním buzením tedy předurčuje jeho použití v pohonech s konstantní rychlostí otáčení v širokém rozsahu změn zátěže. Je však také široce používán v pohonech s proměnnými otáčkami. V tomto případě lze pro regulaci jeho otáček využít změnu jak proudu kotvy, tak i proudu budícího.
Sekvenční buzení DBT
Princip činnosti sériově buzeného stejnosměrného motoru, stejně jako paralelního motoru, je určen jeho mechanickými vlastnostmi, které jsou v tomto případě měkké, protože Otáčky motoru se výrazně mění se změnami zatížení. Kde je nejvýhodnější použít takový stejnosměrný motor? Princip činnosti železničního trakčního motoru, jehož rychlost by se při překonávání náklonů měla snižovat a při pohybu po rovině se vracet na jmenovitou, plně odpovídá charakteristice DFC s OV, zapojeného do série s kotvou. navíjení. Proto je takovými zařízeními vybavena významná část elektrických lokomotiv po celém světě.
Princip činnosti stejnosměrného motoru se sériovým buzením realizují i pulsační proudové trakční motory, což jsou ve skutečnosti stejné stejnosměrné motory se sériovým OV, ale speciálně navržené pro práci s proudem usměrněným již na palubě elektrické lokomotivy. , která má výrazné pulzace.
Činnost jakéhokoli elektromotoru je založena na principu elektromagnetické indukce. Elektromotor se skládá ze stacionární části - statoru (u asynchronních a synchronních střídavých motorů) nebo induktoru (u stejnosměrných motorů) a pohyblivé části - rotoru (u asynchronních a synchronních střídavých motorů) nebo kotvy (u stejnosměrných motorů) . Permanentní magnety se často používají jako induktor na stejnosměrných motorech s nízkým výkonem.
Všechny motory, zhruba řečeno, lze rozdělit do dvou typů:
DC motory
AC motory (asynchronní a synchronní)
DC motory
Podle některých názorů lze tento motor nazvat i synchronním stejnosměrným strojem se samosynchronizací. Jednoduchý motor, který je stejnosměrným strojem, se skládá z permanentního magnetu na induktoru (statoru), 1 elektromagnetu s výraznými póly na kotvě (dvouhrotová kotva s výraznými póly a jedním vinutím), sestavy kartáč-kolektor se 2 deskami (lamelami) ) a 2 kartáči.Jednoduchý motor má 2 polohy rotoru (2 „mrtvé středy“), ze kterých není samostartování možné, a nerovnoměrný točivý moment. K prvnímu přiblížení je magnetické pole statorových pólů rovnoměrné (stejnoměrné).

Tyto motory s jednotkou kartáčového komutátoru jsou:
Kolektor- elektrické zařízení, ve kterém jsou snímač polohy rotoru a proudový spínač ve vinutí totéž zařízení - jednotka kartáč-sběrač.

Bezkartáčový- uzavřený elektromechanický systém sestávající ze synchronního zařízení se sinusovým rozložením magnetického pole v mezeře, snímače polohy rotoru, převodníku souřadnic a výkonového zesilovače. Dražší varianta ve srovnání s kartáčovanými motory.

AC motory
Podle druhu provozu se tyto motory dělí na synchronní a asynchronní motory. Zásadní rozdíl je v tom, že u synchronních strojů se 1. harmonická magnetomotorické síly statoru pohybuje s rychlostí otáčení rotoru (proto se rotor sám otáčí rychlostí otáčení magnetického pole ve statoru), zatímco u asynchronních strojů je a zůstává rozdíl mezi rychlostí otáčení rotoru a rychlostí otáčení magnetického pole ve statoru (pole se točí rychleji než rotor).Synchronní- střídavý motor, jehož rotor se otáčí synchronně s magnetickým polem napájecího napětí. Tyto motory se tradičně používají s obrovským výkonem (stovky kilowattů a více).
Existují synchronní motory s diskrétním úhlovým pohybem rotoru - krokové motory. V nich je tato poloha rotoru fixována napájením odpovídajících vinutí. Přechod do jiné polohy se provádí odstraněním napájecího napětí z některých vinutí a jeho převedením na jiná vinutí motoru.
Dalším typem synchronního motoru je spínaný reluktanční motor, jehož napájení vinutí je tvořeno pomocí polovodičových prvků.

Asynchronní- střídavý motor, u kterého se otáčky rotoru liší od frekvence torzního magnetického pole vytvářeného napájecím napětím druhý název pro asynchronní stroje je indukce z důvodu, že proud ve vinutí rotoru je indukován točivým polem; statoru. Asynchronní stroje dnes tvoří obrovskou část elektrických strojů. Používají se hlavně ve formě elektromotorů a jsou považovány za klíčové měniče elektrické energie na mechanickou energii a používají se hlavně asynchronní motory s rotorem nakrátko.
Podle počtu fází jsou motory:
- jednofázový
- dvoufázový
- třífázový
Nejoblíbenější a nejžádanější motory, které se používají ve výrobě a domácnostech:
Jednofázový asynchronní motor s kotvou nakrátko
Jednofázový asynchronní motor má na statoru pouze 1 pracovní vinutí, do kterého je při provozu motoru přiváděn střídavý proud. I když ke spouštění motoru je na jeho statoru také pomocné vinutí, které je krátkodobě připojeno k síti přes kondenzátor nebo indukčnost, nebo je zkratováno spouštěcími kontakty spínače. To je nutné pro vytvoření počátečního fázového posunu, aby se rotor začal otáčet, jinak by pulzující magnetické pole statoru nepohnulo rotorem z jeho místa.
Rotor takového motoru, stejně jako jakýkoli jiný asynchronní motor s rotorem nakrátko, je válcové jádro s drážkami vyplněnými hliníkem, s bezprostředně odlitými ventilačními lopatkami.
Takový rotor se nazývá rotor s klecí nakrátko. Jednofázové motory se používají v zařízeních s nízkým výkonem, včetně pokojových ventilátorů nebo malých čerpadel.

Dvoufázový asynchronní motor s kotvou nakrátko
Dvoufázové asynchronní motory jsou účinnější při provozu z jednofázové sítě střídavého proudu. Obsahují dvě pracovní vinutí na statoru, umístěná kolmo, přičemž jedno z vinutí je připojeno na střídavou síť přímo a druhé přes kondenzátor s fázovým posunem, takže se uvolní točivé magnetické pole, ale bez kondenzátoru by rotor nehýbat se.
Tyto motory mají mimo jiné rotor nakrátko a jejich použití je ještě širší než u jednofázových motorů. Existují již pračky a různé stroje. Dvoufázové motory pro napájení z jednofázových sítí se nazývají kondenzátorové motory, protože za jejich nezbytnou součást je často považován kondenzátor s fázovým posunem.

Třífázový asynchronní motor s kotvou nakrátko
Třífázový asynchronní motor má na statoru tři pracovní vinutí, posunutá vůči sobě tak, že při zapojení do třífázové sítě jsou jejich magnetická pole posunuta v prostoru vůči sobě o 120 stupňů. Když je třífázový motor připojen k třífázové síti střídavého proudu, objeví se rotující magnetické pole, které způsobí pohyb rotoru nakrátko.
Vinutí statoru třífázového motoru lze zapojit do obvodu „hvězda“ nebo „trojúhelník“, zatímco pro napájení motoru podle obvodu „hvězda“ bude zapotřebí vyšší napětí než pro obvod „trojúhelník“. na motoru, proto jsou indikována 2 napětí, např.: 127/220 nebo 220/380. Třífázové motory jsou nepostradatelné pro pohon různých strojů, navijáků, kotoučových pil, jeřábů atd.

Třífázový asynchronní motor s vinutým rotorem
Třífázový asynchronní motor s fázovým rotorem má stator podobný výše popsaným typům motorů, ve štěrbinách uložený vrstvený magnetický obvod se 3 vinutími, ale fázový rotor není vyplněn duralovými tyčemi, ale skutečným tří- fázové vinutí je již položeno do „hvězdového“ zapojení. Konce vinuté hvězdy rotorového vinutí jsou vyvedeny na tři kontaktní kroužky namontované na hřídeli rotoru a elektricky od ní oddělené.
Pomocí kartáčků je na kroužky mimo jiné přiváděno třífázové střídavé napětí a spínání lze provádět buď přímo, nebo přes reostaty. Motory s vinutým rotorem jsou samozřejmě dražší, i když jejich rozběhový moment při zatížení je mnohem vyšší než u motorů s rotorem nakrátko. Právě v důsledku zvýšené síly a obrovského rozběhového momentu našel tento typ motoru uplatnění v pohonech výtahů a jeřábů, jinými slovy tam, kde se zařízení spouští pod zatížením a ne na volnoběh, jako u motorů s veverkou. klecový rotor.
DC motory určené k přeměně energie stejnosměrného proudu na mechanickou práci.
Stejnosměrné motory jsou mnohem méně běžné než střídavé motory. To je primárně způsobeno srovnatelně vysokou cenou, složitějším zařízením a potížemi při poskytování energie. Ale i přes všechny tyto nevýhody má DBT mnoho výhod. Například střídavé motory je obtížné regulovat, ale DFC jsou dokonale regulovány různými způsoby. Kromě toho mají DFC pevnější mechanické vlastnosti a mohou poskytovat vysoký rozběhový moment.
Stejnosměrné elektromotory se používají jako trakční motory, v elektrické dopravě a jako různé akční členy.
Konstrukce stejnosměrných motorů
Konstrukce stejnosměrného motoru je podobná střídavému motoru, ale stále existují značné rozdíly. Na rámu 7, který je vyroben z oceli, je instalováno budicí vinutí ve formě cívek 6. Mezi hlavními póly lze instalovat další póly 5 pro zlepšení vlastností DFC. Uvnitř je instalována kotva 4, která se skládá z jádra a kolektoru 2 a je instalována pomocí ložisek 1 ve skříni motoru. Komutátor je podstatný rozdíl od střídavých motorů. Je napojen na kartáče 3, což umožňuje napájet nebo naopak odebírat napětí z obvodu kotvy v generátorech.
Princip fungování
Princip činnosti DPT je založen na interakci magnetických polí budícího vinutí a kotvy. Můžete si představit, že místo kotvy máme rám, kterým protéká proud, a místo budícího vinutí permanentní magnet s póly N a S. Když rámem protéká stejnosměrný proud, magnetické pole permanentního magnetu se začne měnit. působí na něj, to znamená, že se rám začne otáčet, a protože se směr proudu nemění, směr otáčení rámu zůstává stejný.
Po přivedení napětí na svorky motoru začne ve vinutí kotvy protékat proud a jak již víme, začne na něj působit magnetické pole stroje, zatímco kotva se začne otáčet, a jelikož se kotva otáčí v magnetické pole, začne se tvořit EMP. Toto EMF je namířeno proti proudu, proto se nazývá zpět EMF. Lze to zjistit pomocí vzorce
Kde Ф je budicí magnetický tok, n je frekvence otáčení a Ce je návrhový moment stroje, který pro něj zůstává konstantní.
Napětí na svorkách je větší než zadní EMF o hodnotu úbytku napětí v obvodu kotvy.
![]()
A pokud tento výraz vynásobíme proudem, dostaneme rovnici bilance výkonu.
![]()



