Japonsko: Mezinárodní výstava robotů. Robotizace v Japonsku – proč ji Japonci potřebují a mohou počítat s úspěchem?

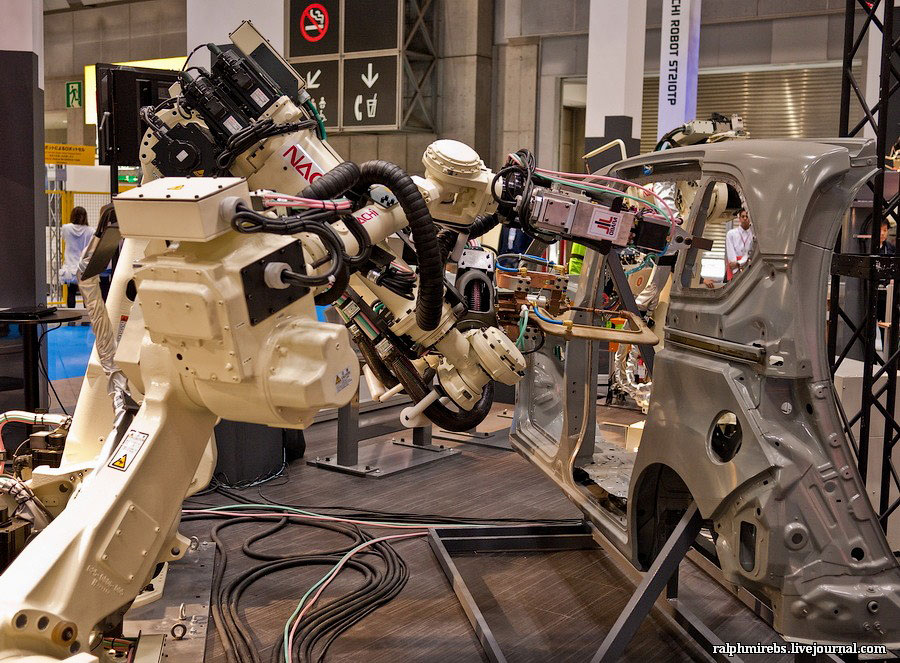
2. Začněme průmyslovými roboty vyráběnými mnoha různými společnostmi, např. Kawasaki, Toshiba, FAUNC, Nachi atd. Tento typ robotů je považován za jeden z nejstarších a jejich účelem je provádět různé rutinní operace přemisťování předmětů z místa k umístění, svařování a řezání dílů, lakování, třídění a montáži. Navenek takoví roboti obvykle vypadají jako mechanické rameno rotující v různých směrech vysokou rychlostí. Na konci paže je „pracovní“ orgán, s jehož pomocí robot uchopuje předměty nebo provádí potřebné operace. Robotovy „oči“ jsou videokamerou, která určuje umístění objektů, jejich orientaci v prostoru, barvu a tvar.







10. Další velkou třídou robotů jsou pomocní roboti. Vytvořené k výkonu práce, mohou vypadat jako krabice s koly a jako lidé - vše závisí na účelu jejich vytvoření. Mohou to být například robotické vysavače a robotické vozíky. Tito dva roboti od Daiwa House se mohou například nezávisle pohybovat po kanceláři, sbírat prach z podlahy nebo přepravovat zboží mezi různými body.


12. Nebo ne vysavač, ale pekelná robotická sekačka na housenkových drahách, na sekání všeho, co jí přijde do cesty.

13. Ostatní roboti jsou navrženi tak, aby pomáhali v domě a lze je ovládat na dálku. Robot Yaskawa je umístěn jako asistent osamělých handicapovaných lidí a seniorů. Ovládaná osobou z jiného města může sbírat předměty, přenášet je a přenášet zvuk a video.

14. Robotický čistič skla. Dvě části tohoto robota jsou umístěny na opačných stranách skla a jsou drženy na místě magnetickou přitažlivostí.

15. Informační tabule robota. Souhlasíte, tato forma reklamy je mnohem atraktivnější než osamělý monitor visící na zdi.

16. Robotický pacient v zubní ordinaci. Slouží k výcviku mladých zubařů, ovládá se hlasem a v reakci na povely otevírá ústa, otáčí hlavou a komunikuje hlasem, jak to cítí...

17. Simulátor jízdy na robotu. Nejsem si jistý, jak efektivní je to ve srovnání s živým koněm, ale vypadá to vtipně i působivě.


19. Roboty Android lze bezpečně umístit do samostatné třídy, přestože jejich účel může být velmi odlišný, od vědeckého výzkumu až po zábavní funkce. Android robot by měl svým vzhledem, způsobem pohybu a sbíráním předmětů připomínat člověka. Zde je několik ukázek a začněme ženským androidem jménem HRP-4C z vědecké skupiny AIST. Dívka má vyvinutou mimiku a umí tančit a zpívat.

Zde je video z jednoho z jejích vystoupení.

21. Video ve skutečnosti jasně ukazuje slabou stránku všech moderních androidů, a to nohy a chůzi. Přes stále vyvinutější plasticitu jejich rukou se roboti ještě neumějí pohybovat rychle a svižně. Dalšími androidy prezentovanými na výstavě jsou HRP-2 a HRP-4 od Kawada Group. První robot z této série byl vydán již v roce 1997. Roboti mohou chodit, provádět gymnastické pohyby, samostatně se zvedat z lehu a sledovat daný cíl

Video demonstrující základní schopnosti HRP-4.

23. Robot projektu RoboThespian je zjevně zmaten, proč se dotyčný rozhodl poobědvat přímo u pultu veletržního stánku před zraky celé veřejnosti. Práce pro veřejnost je koneckonců jeho povoláním, pokud je robotický herec. Mimika, vyvinuté pohyby rukou, dobře vycvičený hlas - to vše ho odlišuje od ostatních bratrů.
Vtipné video věnované tomuto vtipnému androidu.

24. Ale kočka Kokoro I-Fairy již není klasifikována jako android, protože neví, jak chodit. Toto je robotický vypravěč. Ale vždy sedí na hudebním systému, ví, jak rozpoznat tváře, řeč a mluvit různými hlasy.

25. Mimochodem, všichni androidi mají ovládací panel, přes který může člověk kdykoliv převzít kontrolu. Všechny průmyslové roboty mají stejná dálková ovládání. Všechny dálkové ovladače mají velké červené tlačítko nouzového vypnutí, přesně to, které Uri tak dlouho hledal ve filmu „The Adventures of Electronics“.


27. Nikoto je robot, nejnověji vyvinutý na Japonské technologické univerzitě. Co umí xbz :))

28. Obecně platí, že mnoho univerzit prezentovalo mnoho svých studentských výsledků. Přesně studentské, a ne z vědeckých skupin, to znamená, že tito roboti se vyráběli ručně ve třídě z náhradních dílů. Veškerá rozmanitost velmi připomíná stránky časopisu Modeler-Designer, čísla ze 70. let. Jejich elektronické součástky jsou samozřejmě zcela moderní a s největší pravděpodobností standardní, ale liší se od sebe způsoby pohybu a samozřejmě i vzhledem. Níže je tucet fotografií živých mechanismů, které řídí, plazí se a chodí.









37. Další studentský vývoj je prototypem budoucích exoskeletonů pro zvýšení schopností těla a zlepšení kvality života lidí s postižením. V podstatě se jedná o posilovače svalů. Například držím 50 kilogramů rýže a necítím se unavený ani těžký, protože exoskelet, který nosím, podpírá moje paže a záda a brání jim, aby se pod tíhou nákladu potopily a ohnuly. Obecně tento model umožňuje nést až 150 kilogramů.


39. Sériové vzorky takových systémů již mohou pomoci jak při zvedání těžkých břemen, tak při věkem podmíněné slabosti paží a nohou. Systém, který sleduje pokus o ohnutí nohy, s tím začne pomáhat a „vede“ končetinu a zabrání náhlému zhroucení pod váhou těla.




43. Robotičtí pozorovatelé, záchranáři a výzkumníci nemusí mít nutně inteligenci nebo pracovat s programem jako androidi. Vyžaduje se od nich něco úplně jiného, totiž schopnost pohybovat se v různém terénu, například mezi troskami, lézt po žebřících a vidět kolem sebe. Některé z nich jsou určeny k pohybu pod vodou.







50. Některé společnosti, pokud chtějí úspěšně prodávat své výrobky v Rusku, musí okamžitě přemýšlet o změně svého názvu. Tato společnost nevyrábí vlastní roboty, ale zabývá se úpravami a vylepšeními různých jiných modelů pro neobvyklé aplikace. Například Hiro z Kawady se stal barmanem a Nao z francouzské společnosti Aldebaran Robotics se naučil houpat na houpačce.




54. Obecně je Nao velmi zajímavou a slibnou platformou ve třídě domácích a vzdělávacích robotů. Open source, vysoká mobilita základního modelu, zpočátku zabudovaný systém rozpoznávání objektů, ozvučení a nemalé rozměry mu slibují ve srovnání s konkurenty velkou budoucnost. Jedinou nevýhodou, která je vlastní téměř všem moderním systémům, je nerealistická chůze.
Podívejte se na prezentační video o Nao a bude se vám líbit.

55. A toto je jeden z mých robotů, který zůstal v Novosibirsku. Zvláštností této platformy s názvem RobpBuilder je, že části robota lze různě spojovat a získat tak nejen člověka, ale i psa, pavouka, jeřába a mnoho dalšího. Na výstavě byl představen pod jinou značkou.

56. Mimochodem, i takové malé roboty lze naučit dělat úžasné věci. Například standardní stavebnice na sestavení robota od Kondo, po sestavení učili jezdit na kole.
Video o tom, jak robot Kondo KHR-3 jezdí na kole.

57. Terapeutické roboty určené ke komunikaci se seniory a dětmi. Vydávají zvuky, pohybují tlapkami a ocasem, reagují na dotek a někteří dokážou rozpoznat obličeje a řeč.


Video o sociálním robotovi Teddy Bear.

60. Kromě robotů výstava představila různé komponenty pro ně a programovatelné systémy, jako jsou trojrozměrné tiskárny, které vytvářejí předměty z plastu. Ten největší měl velikost lednice. Fotografie zobrazují vzhled, proces vytváření produktu a hotové vzorky.






Tokio Denryoku, provozovatel nouzové jaderné elektrárny Fukušima Dai-ichi, se přestal pokoušet vrátit robotickou sondu, která zůstává nehybná uvnitř jednoho z reaktorů elektrárny. Tokyo Denryoku v pátek poprvé spustilo dálkově ovládaného robota uvnitř zadržovací nádoby reaktoru č. 1. Tento hadovitý robot, dlouhý 60 centimetrů, měl zkoumat poškození uvnitř kontejnmentu. Po asi 10 metrech pohybu se však zastavil.
Představitelé společnosti také v pondělí odložili plány na provedení podobné studie uvnitř stejného ochranného obalu s použitím jiného robota. Jak vysvětlili, toto rozhodnutí bylo učiněno kvůli skutečnosti, že kabel prvního robota v kontejnmentu brání průchodu druhé sondy tam.
A tohle je JAPONSKO! V mém horečném mozku už je „roboti by měli chodit po ulicích“!
Mezitím v „divokém Rusku“...
Speciální mobilní robot STR-1, který se podílel na likvidaci následků havárie v jaderné elektrárně Černobyl.
V roce 2009 pracovala společnost ZAO Diakont na JE Bilibino, kde první energetický blok dosáhl konce své 30leté projektované životnosti. Stanice se skládá ze čtyř stejných energetických bloků o celkovém elektrickém výkonu 48 MW s reaktory EGP-6 (vodo-grafitový heterogenní kanálový reaktor). Tam pomocí robotických zařízení prováděli diagnostiku pláště reaktoru a kovu nádrže biologické ochrany (BPT) energetického bloku č. 1. Proces byl řízen pomocí speciálního televizního systému. Takové komplexy detekují vady ve svarových spojích. Vynálezy obsažené v návrhu umožňují zlepšit kvalitu diagnostiky a výrazně snížit náklady na dávkování. Robota může ovládat pouze jedna osoba. Komplex se skládá ze dvou robotů, z nichž první – diagnostický – zkoumá kov a čistí povrch, a druhý – opravný – nanáší na defekty těsnicí povrchy, aby je odstranil. Komplex je navržen tak, že robot musí proniknout do prostoru reaktoru otvorem o průměru krabičky od sirek. Jedinečnost komplexu spočívá v tom, že je schopen se pohybovat nejen po složitých horizontálních úsecích, ale také po vertikálních a provádět řízení autonomně. Prolog LLC se také podílel na opravě Bilibinského bloku. Její specialisté prohlédli plynový okruh reaktoru a nádrž biologické ochrany prvního energetického bloku JE Bilibino. Uřízli vzorky základního kovu horní desky reaktoru, aby dále prozkoumali jeho stav. Celá práce trvala více než rok a půl a tato jednotka je v současné době v provozu.
nebo opět jednoduchým způsobem: Nádoby reaktoru se postupem času staly netěsnými a vyžadovaly si buď vážné opravy nádoby, nebo její odstavení. Opravy vyžadovaly přístup k jádru. Přirozeně to bylo extrémně kontraindikováno. Našim robotikům se však podařilo vyrobit dva roboty ve tvaru hada, kteří prováděli kontrolu karoserie a svářečské práce. průměr mechanismu byl 5 cm Pouze touto trubkou byl přístup. První robot s ultrazvukovým skenerem prováděl průzkum, druhý se svářečkou a mechanismem pro výměnu elektrod (umístění bylo obdobné jako u sešívaček) navařoval netěsná místa.
Robot MIS kontroluje vnitřek nádoby reaktoru během běžné údržby v jaderné elektrárně Bugey ve Francii.
A znovu o Fukušimě:
Překvapivé také je, že v nouzové Fukušimě museli pracovat roboti zahraničních firem, protože Japonsko bylo již v 80. letech minulého století lídrem ve vývoji a výrobě robotů a robotiky. Kromě toho byl impulsem pro vývoj robotů pracujících v drsném radiačním prostředí incident z roku 1999, ke kterému došlo v japonské palivové elektrárně Tokaimura, během kterého byli tři pracovníci přeexponováni a dva z nich zemřeli. Všichni se tehdy shodli, že robot je v nouzových situacích nepostradatelný. A v roce 2001 bylo vyrobeno šest robotů, což je výsledek společného vývoje čtyř společností, včetně Hitachi, Mitsubishi a Toshiba. Když ale byli v březnu 2011 tito roboti skutečně potřeba, ukázalo se, že zařízení byla odepsána a rozebrána.
Co se stalo? Provozní společnosti byly tak pevně přesvědčeny, že v jaderné elektrárně nemůže dojít k žádné havárii (a námitky vnímaly jako pochyby o kvalifikaci personálu a jako výčitky sobě osobně), a dělníci byli tak proti přítomnosti robotů, že expertní skupina, ve které byli zástupci TEPCO, KEPCO a státu, rozhodla: roboty nejsou v jaderných elektrárnách potřeba. A zbavili se robotů. Ale po 10 letech praktického provozu v jaderných elektrárnách by se jejich vlastnosti mohly výrazně zlepšit. Jeden z členů pracovní skupiny pro odstranění následků havárie v jaderné elektrárně Fukušima podrážděně prohlásil: „Všichni roboti v jaderném průmyslu mají jedno společné: nejsou tam, když jsou nejvíce potřeba.
Všechny tyto bitvy vyvolávají větší problém. Průkopník umělé inteligence Marvin Minsky psal o svém šoku z neschopnosti jaderného průmyslu připravit se na neočekávané. Největší problém vidí v tom, že jaderné elektrárny jsou projektovány bez zohlednění možnosti dálkově ovládaných zařízení. A to přesto, že ostatní oblasti lidské činnosti již dávno začaly zohledňovat možnosti a potřeby robotů. Naproti tomu v podmořských zařízeních je mnoho ventilů a ovladačů navrženo tak, aby vyhovovaly robotickým manipulátorům. Automobilové továrny jsou nyní navrhovány s prioritou integrace robotiky a existují dokonce i zdravotnická zařízení speciálně navržená pro robotické platformy.
Pomalý postup robotů pro jaderné elektrárny není snadné vysvětlit, existují pouze názory a nápady. Jedním z těchto názorů je, že téma robotů a jaderné energie se úzce prolíná s jejich vnímáním společností a politikou. Eiji Koyanagi, zástupce ředitele Japonského vědeckého a technologického centra pro budoucnost robotiky, věří, že financování japonské jaderné robotiky po havárii elektrárny Tokaimura v roce 1999 vyschlo, protože se země snažila vytvořit dojem usilovného úsilí o vytvoření téměř zcela bezpečné jaderné energie. A poskytnutí finančních prostředků by znamenalo, že by se situace mohla stát tak nebezpečnou, že by místo lidí byli potřeba roboti. Zda se tento postoj po Fukušimě změní a jak Japonsko obnoví důvěru ve svůj nejdůležitější zdroj energie, se teprve uvidí.
SLABÉ STRÁNKY ROBOTŮ
Proč se ukázalo, že je obtížnější provést restaurátorské práce na stanici než zastavit únik ropy v tisícimetrové hloubce moře? Na jedné straně je stanice posetá troskami, což ztěžuje přístup i záchranným týmům. Roboty samozřejmě můžete poslat do nebezpečných oblastí, aniž byste riskovali lidské životy. Zaseknutý robot ale znamená nejen ztrátu drahého zařízení, ale také zhoršuje přístup ostatních robotů do těžko dostupných míst.
Malý robot má omezený výkon, zatímco velký je nemotorný. Například ve Fukušimě slabý robot PackBot (firma iRobot) nedokázal otevřít dveře vybavené kulatou klikou. A když iRobot poslal většího robota, ukázalo se, že má potíže s procházením schodišť. Jeden z japonských robotů Quince za 6 milionů dolarů uvízl v omezeném prostoru stanice a 2,5 roku po nehodě je stále v zajetí.
Kromě potíží s obratností při pohybu a ovládání zařízení se roboti v jaderných elektrárnách potýkají s problémy se spolehlivostí bezdrátové komunikace kvůli intenzivní radiaci. Ionizující záření může fyzicky poškodit elektroniku narušením struktury polovodičových krystalů generováním laviny elektronů a posunutím prahu pro otevření tranzistorů s efektem pole. V obou případech se výkonnostní charakteristiky jednotlivých elektronických součástek mění, což vede k selhání. Zařízení chráněná proti záření se testují měřením celkové dávky, kterou obdrží (obvykle v sievertech), než dojde k poruše. Ale radioaktivní poškození je statistické povahy, takže „přežití“ zařízení není nikdy zaručeno. Snímky budovy jaderné elektrárny Fukušima přenášené roboty byly zkreslené, když se zařízení přiblížilo k radiačním „horkým“ místům.
Mohou nastat i problémy s komunikací. Po Fukušimě NEDO vyvinulo hybridní mobilní síť pro dálkové ovládání robotů, která zahrnovala jak drátové, tak bezdrátové buňky. Reaktorové budovy byly relativně malé a byly zcela pokryty hybridní sítí. Jejich tlusté betonové stěny, které blokovaly gama paprsky, však způsobily, že bezdrátová komunikace byla pravděpodobně obtížná nebo nemožná.
Dalším problémem byl japonský rozhlasový zákon. Vzhledem k hustému osídlení země je tento zákon velmi přísný ohledně intenzity elektrického pole a povoluje maximálně 10 mW výkonu vysílače. V tomto případě je vzdálenost bezdrátové komunikace v interiéru maximálně 50 metrů. Proto, aby bylo možné používat výkonnější rádiové vlny k ovládání robotů v nouzové Fukušimě, bylo nutné získat zvláštní povolení od ministerstva vnitra a komunikací. Vybrali jsme zařízení Contec 2,4 GHz (pro robota - FX-DS540-STDM s dipólovou anténou a pro call centrum FX-DS540-LNKM-S s anténou Yagi) a také jednowattové zesilovače.
Slibný vývoj
Co bude dál? Mitsubishi nedávno představilo radiaci odolné roboty MEISTeR (Maintenance Equipment Integrated System of Telecontrol Robot), které budou schopny efektivněji pracovat při čištění jaderné elektrárny Fukušima. Tito roboti se dokážou ohnout jako lidská paže, díky sedmi stupňům pohyblivosti je každý z nich schopen zvednout až 15 kg nákladu. Hrot manipulátoru je navržen tak, aby na něj bylo možné rychle a snadno připevnit různé nástroje, jako je pila, příklepová vrtačka nebo vrtačka. Společnost tvrdí, že vyvinula speciální nástroj, který dokáže odebírat vzorky povrchu stěn a betonových podlah v kontaminovaných oblastech z hloubky až 70 mm (asi 2,5 palce). MEISTeR váží 440 kg, měří 130 cm na výšku, 70 cm na šířku a 125 cm na délku. Dokáže se pohybovat rychlostí až 2 km/h, a to jak na rovném vodorovném povrchu, tak i na nerovném terénu. Robot může dokonce vyjíždět a sestupovat po schodech se stupni až 22 cm vysokými, a to díky čtyřem nezávisle se pohybujícím tankovým pásům. Akce robota jsou ovládány na dálku a předpokládaná doba provozu v autonomním režimu je dvě hodiny. Je vybaven elektronikou, která bude spolehlivě fungovat v radiačních podmínkách. Důležité je, že tato zařízení jsou vybavena logickými obvody, které v případě, řekněme, netěsnosti hydrauliky, dokážou vyslat alarm dříve, než dojde k poruše. To znamená, že je lze rychle a levně opravit.
Kromě nouzových robotů existují zajímavé novinky, které umožňují provádět kontroly takříkajíc „v době míru“ – bez odstavení reaktoru a bez rizika pro operátory. Korporace AREVA tak v roce 2007 vytvořila skupinu NETEC (Non-Destructive Examinations Solutions Technical Center) - technické centrum pro řešení nedestruktivní kontroly - která zaměstnává více než 50 vědců a inženýrů. Vyvíjejí se zde nové kontrolní technologie a nové senzory. Z vývoje společnosti AREVA byly dosud testovány a testovány například systémy kontroly reaktorových nádob MIS7 a TWS, které výrazně zkrátily dobu odstavení reaktoru.
Podvodní robot SUSI může plavat v primárním chladivu reaktoru, což pomocí ultrazvukového a vizuálního testování umožňuje inspekci vnitřních struktur reaktoru za účelem potvrzení bezpečnosti těchto komponent pro další provoz. Tento robot byl nedávno použit ke kontrole jedné z amerických jaderných elektráren, jejíž název nebyl zveřejněn.
JASPER umožňuje bezpečnou kontrolu sestavy aktivní zóny řídicího a ochranného systému jaderného reaktoru. Nový RANGER pro kontrolu potrubí parogenerátoru lze snadno vložit do oblasti, která má být kontrolována.
Většina těchto slibných vývojů, ačkoliv byla testována, však dosud nebyla testována v bojových podmínkách havárií nebo poruch reaktoru.
Zdroje
http://atomicexpert.com/content/%D1%81%D0%BB%D1%83%D0%B6%D0%B8%D1%82%D1%8C-%D0%B8-%D0%B7%D0 %B0%D1%89%D0%B8%D1%89%D0%B0%D1%82%D1%8C
http://www3.nhk.or.jp/nhkworld/russian/top/news09.html
A ještě jedna věc, o které jsme již diskutovali o Fukušimě: zde a další. Ale mimochodem, kdysi to tak bylo a bylo. Připomeňme si Původní článek je na webu InfoGlaz.rf Odkaz na článek, ze kterého byla vytvořena tato kopie -Japonci mají velmi rádi roboty a vše, co s nimi souvisí. To je vyjádřeno nejen v jejich kultuře (vzpomeňte si na četné anime série jako Gundam), ale i v běžném životě. Mnoho Japonců kupuje roboty pro různé domácí účely a pro děti - hračky ve formě robotů.
V tomto ohledu jsou obyvatelé Země vycházejícího slunce daleko před obyvateli USA nebo Německa, i když tamní robotika není o nic méně rozvinutá. Odpověď leží v samotných Japoncích. Jejich starověká kultura přijímala roboty zcela organicky.
Mýtus o robotech jako hrozbě pro spiritualitu
Tradiční náboženství v Japonsku – šintoismus („cesta bohů“) – zbožňuje přírodní síly a jevy. Japonci odnepaměti věří, že i neživé věci mají duchovní podstatu – kami. Šintoismus vidí kami v kameni, v předmětu pro domácnost, v mechanickém zařízení. Jak jsi mohl nevidět kami v robotovi?
Podle japonského názoru může pouze duchovně prázdný člověk tvrdit, že roboti jsou hrozbou pro spiritualitu. Nejsou to věci, které ohrožují spiritualitu, ale lidé.
Trailer anime seriálu Gundam
Tento postoj je patrný již od dětství. Na Západě děti při pohledu na roboty někdy pláčou a křičí hrůzou, což není překvapivé po zhlédnutí mnoha filmů o vzteklých zabijáckých strojích. Pro japonské děti jsou ale roboti spřízněné duše, hraví a vždy připraveni pomoci.
Malí Japonci si s roboty nejen hrají, ale také je sami tvoří. z čeho? Od všeho, co vám přijde pod ruku, od jednorázových vidliček po zeleninu a plyšové hračky. Tato zábava není cizí ani dospělým, soudě podle šampionátu Hebocon(heboi lze přeložit jako „špatný“ nebo „ubohý“). První soutěž se konala v červenci 2014, poslední- v srpnu 2016. Další velká soutěž je naplánována na polovinu roku 2017 a na rok 2020 je plánována rozsáhlá akce, která se bude konat souběžně s olympijskými hrami v Tokiu.
"Abyste vyrobili robota heboi, stačí si koupit velmi jednoduché materiály nebo použít to, co najdete na ulici poblíž svého domu. Nemusíte přemýšlet o složitosti pohybů a funkcí, nemusíte Stačí to udělat, aby se váš robot mohl pohybovat, ale nezáleží na tom, jak se váš robot nemůže začít pohybovat sám, zatlačte na něj, není na tom nic špatného pořadatel šampionátu Daiju Ishikawa. A abyste vyrobili „nejlepšího nejhoršího robota na světě“, radí Ishikawa, „přenechte výrobu nejdůležitější části pětiletému dítěti“.

Snad alespoň obyvatelé venkova nejsou tak dětinští? Přesto by se měli starat o osud divoké zvěře, polí a zahrad. V Japonsku se ale vkládají naděje do robotů, kteří zachrání zemědělství.
Mýtus o robotech jako antipodu přírody
V loňském roce japonské ministerstvo zemědělství vyvinulo nový socioekonomický program, jehož hlavní myšlenkou je nahradit odcházející farmáře roboty. Jak poznamenává ministr Hiroshi Moriyama, průměrný věk japonských farmářů je dnes 67 let. S tím, jak zemědělci odcházejí do důchodu, v zemědělství pracuje stále méně práceschopných lidí. Hrozí tak potravinová krize.
Stojí za připomenutí, že v mnoha evropských zemích se problém nedostatku pracovních sil na farmách řeší přilákáním sezónních pracovních migrantů. V Japonsku se přistěhovalectví, mírně řečeno, nepodporuje. Místo zahraniční pracovní síly se rozhodli chovat roboty.

Podle programu by mělo být vyvinuto 20 nových typů robotů, například stroj, který bude třídit zralé a přezrálé broskve přímo při sklizni. Každého farmáře v důchodu nahradí několik typů robotů, včetně bezpilotních traktorů. Vývoj takových strojů provádí Kubota Corporation. Již byl vytvořen prototyp bezpilotního traktoru, který pomocí GPS určuje hranice pracovního pole, umí samostatně analyzovat stav půdy a také pole orat a hnojit. Společnosti Iseki a Yanmar vytvářejí různé typy kombajnů a Hitachi vyvíjí systémy pro zemědělské roboty.

Japonci se ale vůbec nechystají vytlačit farmáře roboty. Pro ty, kteří chtějí pracovat v zemědělství, vytváří robotika nové příležitosti. Tentýž Kubota oznámil vývoj speciálního lehkého exoskeletu, který farmářům usnadní sklízení plodin a přenášení nádob s ovocem a zeleninou.

Mýtus o robotech jako lidských konkurentech
Nicméně problém lidí, kteří jsou vytlačováni roboty, existuje. Cestující na mezinárodním letišti Narita ve východní části Velkého Tokia budou moci brzy na vlastní oči vidět robotizaci Japonska, když jim začnou pomáhat robotičtí asistenti. Hospi(R) od Panasonicu. Minulý měsíc už byly testovány na letišti a v přilehlém hotelu ANA Crowne Plaza.
Lidé v Japonsku si na roboty zvykají od dětství, nedostatek pracovních sil se totiž týká i mateřských škol. Stejně jako v mnoha jiných oborech tuto mezeru vyplňují roboti. Například loni v létě Global Bridge Holdings, startup sídlící v Tokiu, představil robotickou chůvu. Malý robot s hlavou medvídka se jmenuje Vevo. Děti pozná zrakem, pozdraví je při příchodu do školky a umí jim změřit i teplotu.
hotely
Práce na recepci vyžaduje opravdovou výdrž: musíte odpovídat na stejné otázky a provádět běžné operace, jako je registrace hostů, aniž byste ztratili svou přívětivost.
V tomto nelehkém úkolu mohou člověka nahradit roboti jako RecepROID od japonské společnosti Kyoei Sangyo nebo francouzský Nao, představený minulý týden na výstavě RoboDEX. To, co je odlišuje od lidí, je nejen jejich neúnavnost a odolnost vůči stresu, ale také znalost jazyků. RecepROID mluví čtyřmi, Nao mluví 15.
Takoví roboti se již používají: před dvěma lety byl v Nagasaki otevřen hotel, jehož hlavním personálem jsou roboti. Vítají hosty, vyzvednou jejich zavazadla a přijímají objednávky na pokojovou službu. Naštěstí ne všechny vypadají jako figuríny z nočních můr, které ožívají: antropomorfnímu robotovi na recepci pomáhají dva roztomilí dinosauři.
Továrny
Vývoj dalšího vystavovatele, Kawasaki Heavy Industries, se zaměřuje na oblasti, kde lidé obvykle pracují, protože pro stroje jsou prováděné operace stále příliš složité, protože vyžadují lidské znalosti: je při montáži mechanismu pevně utažena matice, jaký tlak může nanášet na povrch při leštění. Automatizace takové práce vyžaduje neúměrné náklady: použití velkého množství senzorů a převybavení výrobních linek. Systém, který společnost vyvinula k řešení těchto problémů, se nazývá Následník.
Myšlenka je tato: nejprve člověk ovládá robota pomocí dálkového ovladače, který je vyroben tak, aby co nejpřesněji zprostředkoval vjemy během provozu. Robot vybavený umělou inteligencí se naučí potřebné operace a dokáže je následně reprodukovat.
nemocnice
Další náročnou prací, psychicky i fyzicky, je péče o nemocné a nemohoucí. V Japonsku na to také existují roboti. Robobear, vyvinutý v Japonském centru pro výzkum interakce robotů a lidí, je navržen tak, aby zvedal pacienty upoutané na lůžko, přenášel je a pomáhal jim sedět na invalidním vozíku.
A pro zlepšení psychického stavu pacientů v Japonsku bylo vyvinuto robotické tulení mládě. Vybaveno hromadou senzorů, reaguje na dotek, světlo, teplotu, zvuky, reaguje na své jméno a umí se učit: když ho pohladíte, zopakuje akce, po kterých bylo pohlazení, a když ho naplácáte, tak neřest. naopak.
Pohřeb
Pepper, malý robot vyvinutý společností SoftBank Robotics, je mistr všech řemesel. Zdraví lidi v obchodních centrech a restauracích, prodává melouny - obecně má mnohostranné využití. Jedním z nich je čtení modliteb na pohřbu.
Vezmeme-li v úvahu, že smrt je v Japonsku drahá záležitost a služby živého kněze stojí více než 2000 dolarů za pohřeb, vypadá robot, který se dá pronajmout za 500 dolarů, jako velmi atraktivní alternativa.
Laboratoř JSK na Tokijské univerzitě již několik let pracuje na vytváření humanoidních robotů, kteří napodobují rysy lidského těla. Nedávno společnost JSK představila nového robota Kengoro, který přesně kopíruje náš pohybový aparát a svaly. Fanoušci „Terminátora“ jej již nazvali předchůdcem T-800, ale samotní vývojáři jej plánují používat výhradně pro mírové účely. Například takový robot se může stát výborným pomocníkem fitness instruktora. Realisticky ukazuje účinky tréninku různých svalových skupin a dokonce se i zapotíte.
Dříve JSK Lab (Jouhou System Kougaku Laboratory) vytvořila roboty Macra (připomínající dítě) a robota Kenshiro (simulující teenagera). Macra má vysokou hmatovou citlivost s malým počtem senzorů - je jich pouze 49 Zaznamenávají nejen sílu stisku, ale i jejich vektory, proto se jim říká „3D Force“. Tyto senzory jsou umístěny pod společnou pružnou vrstvou, která simuluje měkkou tkáň. Ovladač zpracovává data ze všech senzorů současně a pomocí matematických algoritmů zpřesňuje dotykové informace.
Robot Macra. Obrázek: jsk.t.u-tokyo.ac.jp
Kenshiro napodobuje třináctiletého chlapce, vysokého 158 cm a vážícího 50 kg. Specialisté JSK Lab v něm začali ztělesňovat individuální anatomické a fyziologické rysy člověka. Jestliže další humanoidní roboti byli vytvořeni na základě mechanických teorií, pak při navrhování Kenshiro použili biomimikry. Replikuje muskuloskeletální strukturu a větve nervového systému, jasně demonstruje jejich propojení a chování v různých situacích.Skelet Kenshiro je vyroben převážně z hliníkové slitiny A5052. Kloubové plochy a další tvarově složité díly jsou vyrobeny 3D tiskem z ABS plastu a nerezové oceli 420 SS. Elastická žebra jsou vyrobena odléváním z jiné hliníkové slitiny - JIS-AC4C.

Kengoro je tak realistický, že se při tréninku dokonce „zapotí“. Stejně jako lidé to dělá robot, aby se vyhnul přehřátí. Chladivo cirkuluje v Kengorových umělých svalech. Vývojáři testovali různé formulace a usadili se na běžné deionizované vodě. Má rekordní tepelnou kapacitu, nízkou cenu a je bezpečný pro elektroniku, protože nevede elektrický proud.
Během provozu jsou kapky zcela demineralizované vody vytlačovány miniaturními laserem vyřezávanými otvory ve všech oblastech těla. Rychle se odpařuje a snižuje svou teplotu. Výsledkem je samoregulační systém: čím intenzivněji umělý sval pracuje, tím rychleji se ochlazuje.
Neustálé odpařování kapaliny není tak účinné jako její cirkulace v uzavřeném chladicím okruhu. Musí se přidat přibližně jednu nebo dvě sklenice za hodinu. Porézní struktura a eliminace masivních radiátorů však umožnily robota odlehčit. Výkon „potícího se“ chladicího systému stačí na to, aby Kengoro vykonával intenzivní pracovní zátěž a měl čas předvést různá cvičení. Zvládne například kliky vleže 11 minut bez zastavení...jak dlouho to zvládnete?
Úspěchy JSK Lab ukazují, že v robotice je nyní vidět nová divize. Mezi humanoidními roboty lze nalézt zástupce dvou hlavních typů: s axiálním ovládáním a s využitím umělých šlach. První skupina má aktuátory v každém kloubu a má malý počet stupňů volnosti – až 35. Nejznámějšími zástupci této skupiny jsou roboty Honda ASIMO a HPR-2 Promet.
Druhou skupinu představují modernější a flexibilnější roboty. Částečně napodobují anatomické rysy lidských kloubů, ale větší pružnosti je dosaženo na úkor jejich síly a síly.
I takoví roboti mají k člověku ještě hodně daleko: díky ohebné páteři a zvláštnostem kloubních ploch máme mnohem větší pohyblivost. Západní lékaři sportovní medicíny obvykle nazývají 220 – 260 stupňů volnosti, zatímco jejich japonští kolegové dokonce identifikují 548 stupňů volnosti (nebo 419, pokud nepočítáte hlavu a paže).
Jemné motorické manipulace byly vždy nejnáročnější částí. V Kenshiro bylo možné implementovat 64 stupňů volnosti a v Kengoro - 174 (z nichž 60 je v rukou). Důležité také je, že při tvorbě Kengora dokázali vývojáři zajistit rovnováhu mezi plasticitou jeho pohybů a silou umělých svalů. Kengoro je schopen viset na jedné paži, provádět zvedání lýtek ve stoje a udržovat rovnováhu téměř v jakékoli poloze.
Pokud většina humanoidních robotů jen matně připomíná člověka obrysy, pak Kenshiro a Kengoro jsou vyrobeny s přísným dodržováním proporcí. Jejich odchylka od parametrů průměrného Japonce nepřesahuje jedno procento délky žádné části těla a šestnáct procent celkové hmotnosti. Ve skutečnosti jsou tito roboti více podobní lidem než mnozí z nás.
Hlavními oblastmi použití nových robotů jsou interaktivní fitness kurzy, vývoj sportovního vybavení, studium biomechaniky, provádění kaskadérských kousků a pokročilé crash testy. Stávající figuríny umožňují hodnotit pouze pasivní bezpečnost automobilů. Vždy zůstávají nehybné až do okamžiku dopadu. „Mimetičtí humanoidi“, jak je sami vývojáři nazývají, jsou schopni napodobit chování řidiče a cestujících v době nehody.



