Роботы, основные категории. Бытовые роботы - обзор роботов различного назначения
Научно-технический прогресс на месте не стоит. Новейшие технологии всё больше размывают границы между фантазией и реальностью.
Роботы уже давно перестали быть научной фантастикой. Сегодня они наши незаменимые помощники во многих отраслях деятельности. В этой статье мы посмотрим как выглядят и что умеют самые совершенные на сегодняшний день роботы.
Марсоход Curiosity

Самый совершенный на сегодняшний день марсоход третьего поколения. На его разработку NASA потратили 10 лет и 2,5 млрд. долларов. По сути это автономная химическая лаборатория на колёсах, размером с небольшой автомобиль. Его создали специально для исследования кратера Гейла. Curiosity буквально напичкан всевозможными приборами и датчиками, которые умеют делать практически всё от съёмки фото в выском разрешении до спектрального анализа твёрдых грунтовых пород.
Geminoid DK

Это один из самых реалистичных человекоподобных роботов. Его построил Хироши Исигуро вместе со своими коллегами из Japan’s Advanced Telecommunications Research Institute International. Внешность этого робота является точной копией профессора Хенрика Шарфе из Aalborg University. Geminoid DK может управляться дистанционно, с помощью передовой технологии захвата движений. Она позволяет машине имитировать выражение лица и точно повторять движения.
Baxter

Бакстер - необычный промышленный робот, хоть и выглядит вполне заурядно. Такие модели можно встретить практически на всех более-менее современных машиностроительных предприятиях. Главная его особенность заключается в повышенной безопасности. Обычные промышленные роботы такой чертой совсем не отличаются. Если человеку непосчастливится попасть под их механические руки-клещи, то всё может кончиться достаточно печально. Но только не в случае с Бакстером. В его «голове» находится камера, которая следит, чтобы в поле деятельности не было инородных предметов. Если таковые попадаются, то ультразвуковые моторы, контролирующие захваты механических «рук» автоматически отпускают «клещи».
Paul

Paul, пожалуй, меньше всего похож на робота в привычном нам понимании. Но то, что он делает - просто потрясающе. Это настоящий робот-художник, который состоит из одной лишь механической руки, которая держит карандаш или авторучку. Процесс рисования предельно прост: человек садиться напротив камеры, которая сканирует его лицо, а затем «рука» Paul начинает рисовать портрет. Причём рисует робот не по шаблону, каждый портрет даже одного и того же человека, получается уникальным. В его рисунках действительно есть какой-то стиль.
WildCat

Разработка знаменитой компании Boston Dynamics. Это робот-разведчик, который способен передвигаться по пересечённой местности, а в режиме галопа может разгоняться до 25,7 км/ч. Да-да, этот робот умеет скакать галопом. А ещё резко останавливаться и разворачиваться. Кроме того WildCat невероятно устойчивый «уронить» его - настоящая проблема.
S-One

Робот-спасатель от японской компании Schaft, которую в итоге купила Google (также как и Boston Dynamics, кстати). S-One небольшой, коренастый, крайне устойчивый и очень сильный робот. Он может поднимать тяжести, орудовать дрелью, легко справляется с вентилями и дверными ручками. Благодаря особым новейшим разработкам создателям робота удалось добиться невероятной быстроты и плавности выполнения поставленных задач.
Sub1

Этого робота создали двое разработчиков программного обеспечения из США Джей Флэтлэнд и Пол Роуз. Робот состоит из 6 шаговых двигателей, 4 веб-камер и небольшого числа общедоступных деталей. А основная его задача - собирать кубик Рубика. И делает он это, вы только вдумайтесь, менее, чем за одну секунду. Среди людей рекорд по скоростной сборке кубика Рубика принадлежит сейчас американскому подростку Лукасу Эттеру. Осенью 2015 года он собрал кубик за 4,9 секунды. Роботу Sub1 понадобилось всего 0,887 секунды.
Row-bot

Новейшая разработка учёных из Бристольского университета. Row-bot - это прототип робота, который предназначен для того, чтобы передвигаться по поверхности загрязнённых водоёмов и поедать микробы, которые, собственно и делают воду грязной. Примечательно, что «съеденных» микробов Row-bot использует как биотопливо для выработки энергии и продолжения работы.

M-2000iA/1700L

Японская компания FANUC разработала самого сильного робота в мире. Название у него, конечно, не очень благозвучное, но зато возможности поистине впечатляющие. Робот-силач с «размахом руки» 4,7 метра, может поднимать предметы весом до 1700 кг. Предыдущий самый сильный робот планеты Titan, мог манипулировать предметами весом до 1 тонны, но и «рука» у него была чуть длиннее - 6,5 метров.
Atlas

Компания Boston Dynamisc не так давно представила широкой публике новое поколение своего робота под название Atlas. B его способности просто поражают воображение. Двуногий человекоподобный робот легко гуляет по зимнему лесу с очень сложным рельефом. При этом он сохраняет равновесие даже тогда, когда его ноги проваливаются в снег. Но если всё-таки упадёт, робот способен самостоятельно подняться практически из любого положения.
Роботы. Пока еще это экзотика, но тем не менее, они все увереннее входят в нашу жизнь. Три закона роботехники Айзека Айзимова скоро перестанут быть только развлекательной литературой. Роботы – существа, которые одновременно завораживают и пугают своей человечностью и одновременно машинностью. Производство роботов развивается постоянно. Посмотрите на десятку самых интересных экземпляров на сегодняшний день.
ASIMO: Робот-гуманоид

ASIMO – это робот-гуманоид, созданный компанией Хонда. Ростом в 130 сантиметров и весом в 54 килограмма, робот похож на маленького астронавта, который несет рюкзак. Он умеет ходить на двух ногах, копируя человеческую походку скоростью в 6 км/ч. ASIMO был создан в Японии в «Центре исследований и развития» Хонды. Эта последняя модель в серии, а всего их одиннадцать, первый робот был создан в 1986 году.
Официально имя робота – это сокращение от "Advanced Step in Innovative MObility", то есть буквально «Продвинутый шаг в передовой мобильности».в 2002 году существовало 20 роботов ASIMO. Каждый стоит миллион долларов за производство, и некоторые экземпляры можно взять напрокат за 150 тысяч долларов в месяц.
Распознавание движущихся объектов
Используя зрительную информацию, которую собирает вмонтированная в голову робота видеокамера, ASIMO распознает движения множества объектов, а также оценивает расстояние от них и их направление. С помощью комплекса этих технологий робот может следить за перемещениями людей камерой, следовать за человеком или поприветствовать его, когда он приближается.
Распознавание поз и жестов
ASIMO умеет интерпретировать позиции и движения руки, распознавать позы и жесты. Благодаря чему робот может реагировать не только на голосовые команды, но и на естественные телодвижения людей. Таким образом он, например, понимает, когда ему предлагают рукопожатие или когда человек ему машет, и отвечает взаимностью. Кроме того, он понимает, когда ему указывают направление движения.
Распознавание окружающей среды
ASIMO умеет анализировать окружающие объекты и ландшафт и действовать так, чтобы это было безопасно для него и находящихся рядом людей. Например, он узнает потенциально рискованные объекты, такие, как лестницы, а также останавливается или обходит людей и другие движущиеся объекты, чтобы не столкнуться с ними.
Распознавание звуков
Возможности робота распознавать род звуков углубились, и теперь он знает разницу между голосами и прочими звуками. Он отвечает на свое имя, поворачивается лицом к человеку, с которым разговаривает, реагирует на внезапные необычные звуки вроде упавшего предмета или столкновения, и поворачивает голову в этом направлении.
Распознавание лиц
ASIMO может узнавать человеческие лица, даже когда человек двигается. Он может отдельно различать 10 человеческих лиц. Когда их зарегистрируют в его памяти, он будет обращаться к ним по имени.

Albert Hubo: робот-Эйнштейн

Робот Альберт Хубо (Albert HUBO) – андроидный робот. Его внешний вид составляет голова, которая копирует голову ученого Альберта Эйнштейна, и туловище довольно известного гуманоидного робота Хубо. Период разработки составил три месяца и завершился в ноябре 2005 года. Голова была разработана компанией Hanson-Robotics. Тело сделано из специфического материала, Frubber, который частенько используют в Голливуде.
Голова имеет 35 суставов, благодаря чему может выражать различные эмоции на лице, пользуясь независимыми движениями глаз и губ. Также в голове есть две CCD камеры для визуального распознавания. Кроме того, Альберт умеет вытворять все присущие Хубо представления, поэтому возможно выражать еще больше естественных человеческих движений и манер поведения. В теле спрятаны полимерные литиевые батареи, которые обеспечивают около двух с половиной часов автономной работы робота.
С помощью удаленной сети роботом Альбертом можно управлять из внешнего компьютера. Впервые Альберт Хумо был представлен в 2005 году на саммите АПЕК в Пусане (Корея). Его похвалили многие мировые лидеры: президент США, премьер-министр Японии и т.п.

Stanley: самоуправляемое транспортное средство
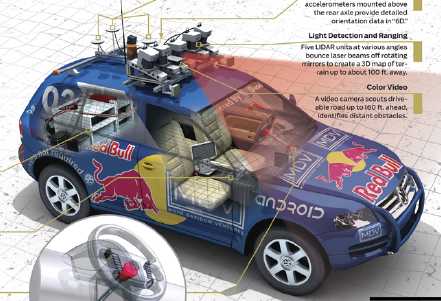
Стэнли (Stanley) – это автономное средство передвижения, созданное гоночной командой Стэнфордского университета. Это обычный Фольксваген Туарег, доработанный до возможности управления только бортовыми компьютерами. Он принимал участие и победил в DARPA Grand Challenge в 2005 году и принес Стаэнфордской гоночной команде приз размером в два миллиона долларов, самый большой денежный приз за всю историю роботов.
Сенсоры, использованные в Стэнли, включают в себя пять лазерных лидаров, пару радаров, стереокамеру и однообъективную камеру. Обрабатывают информацию и определяют позицию машины GPS-приемник, GPS-компас, инерционная система управления, а информацию об одометрии колес получает внутренняя CAN шина Туарега. Компьютерная часть – это шесть мощных компьютеров Intel Pentium M с разными конфигурациями и операционными системами Линукс.
Стэнли наделена системой обнаружения приближающихся препятствий. Данные из лидаров скомбинированы с изображениями из визуальной системы, чтобы составить более полную картину обзора. Если приемлимую дорогу невозможно распознать хотя бы на ближайшие 40 метров, скорость снижается, а лидары ищут безопасный путь.
Кстати, вождение Стэнли программировали, пользуясь записью человеческого вождения в пустыне, а затем устанавливая точное значение каждому биту информации, создаваемой его системой сенсоров. После этой модификации машина-робот начала кататься со скоростью 45 миль в час по дорогам, пересеченным тенями деревьев. Пока точные значения для данных не были заданы, машина испуганно сворачивала с дороги, уверенная, что путь пересечен не тенями, а ямами.

BigDog: робот-мул
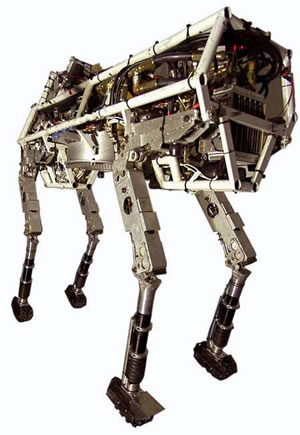
БогДог (BigDog, буквально – Большой Пес) – это четвероногий робот, созданный компанией Boston Dynamics в 2005 году. Проект БигДог финансировало Агентство защиты передовых исследований в надежде, что это создание сможет служить роботом-мулом для солдат на слишком грубой для транспорта местности.
БигДог весит 75 килограммов, он метровый в длину, а в высоты – 0, 7 метра. На данный момент он может путешествовать по тяжелой для передвижения местности со скоростью 5,3 км/ч, нести вес в 54 килограмма и карабкаться по склонам наклоном в 35 градусов.

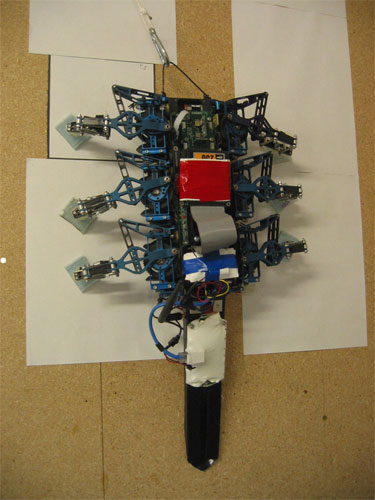
RiSE: карабкающийся робот

Райз (RiSE) – это маленький шестилапый робот, который забирается по вертикальным поверхностям: стенам, деревьям, заборам. На пятках Райза имеются когти, микрокогти или липкий материал, в зависимости от поверхности, по которой надо лазать. Робот меняет позы, чтобы приспособиться к наклону поверхности, а зафиксированный хвост помогает балансировать на крутых поверхностях. Малыш весит всего 2 килограмма, в длину составляет 0,25 метра, бегает со скоростью 0,3 м/с.
Каждая из шести лап робота оснащена двумя электромоторами. Бортовой компьютер управляет лапами, определяет способ коммуникации с землей и обсуживает разнообразные сенсоры. В том числе сенсор, рассчитывающий инертность, сенсор позиции сустава для каждой лапы, сенсор натяжения лап и датчик контакта ступней.
Будущие версии Райза будут использовать сухое прилипание, чтобы карабкаться по совершенно гладким отвесным поверхностям, таким как стекло и металл. Райз разработали совместно исследователи Пенсильванского университета, университетов Карнеги Меллон, Беркли, Стэнфорда, а также университета Льюиса и Кларка. Проект спонсировал Офис защиты науки DARPA.
QRIO: танцующий робот
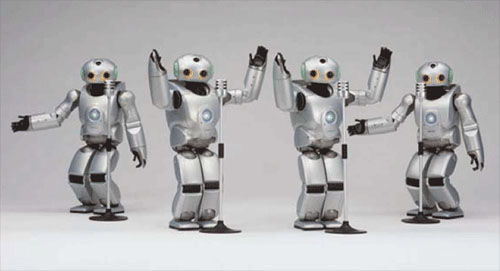
QRIO ("Quest for cuRIOsity" – «Задача для любопытства») – это двуногий гуманоидный робот для развлечения, созданный и проданный Сони, чтобы не затухал успех их игрушки AIBO (робот-собачка). QRIO обладает ростом в 0,6 метра и весит 7,3 килограмма.
Робот умеет распознавать голоса и лица, благодаря чему может запоминать людей и их пристрастия и антипатии. Он умеет бегать со скоростью 23 см в секунду, что зафиксировано в Книге рекордов Гиннеса (2005 года) как первый, самый скоростной, двуногий робот, который бегает. Робот QRIO четвертого поколения работает от батареи час.
Четвертое поколение этих роботов умеет танцевать под Hell Yes, музыкальный клип исполнителя Beck. Эти экземпляры дополнены третьей камерой на лбу, и у них улучшили руки и запястья. Программисты работали три недели, чтобы обучить этих роботов хореографии.
Робот является автоматическим устройством. Он действует по заложенной в него программе. Робот сделан по подобию живого организма и получает информацию от сенсоров (датчиков). Впервые слово робот ввел в употребление чешский писатель Карел Чапек и его брат Йозеф в 1920 году для пьесы «Россумские универсальные роботы». Означает оно подневольный труд и происходит от чешского слова «robota» или «robot».
Ранее в переводе на русский язык оно звучало как «роботарь», но в наше время мы его уже практически не услышим.
Для чего нужны роботы?
Робот нужен для того, чтобы заменить человека в тяжелых производственных или опасных условиях. Робот работает по заложенной в него программе, на основе получения информации от внешних устройств – сенсоров или по другому датчиков. Фактически любой робот копирует живые организмы и органы чувств людей, животных. То есть использует принципы такой прикладной науки как бионика.
Могут работать автономно или управляться оператором, то есть человеком, который отдает команды. В промышленности обычно используются стационарные роботы, которые совсем не похожи на людей. Это различного вида
- станки
- производственные линии
- манипуляторы и прочее.
Роботы, похожие на людей, называются андроидами. Сейчас их больше используют как бытовые игрушки или как помощника по дому с очень ограниченным функционалом.
Какие бывают типы роботов:
Промышленные роботы
– выполняют различные производственные задачи. Всегда есть устройство управления – контроллер, может включать в себя манипулятор, сервопривод, различные сенсоры, пневмоцилиндры и многое другое. Все зависит от того, что делают на этом производстве. Например — склады, логистика здесь требуются конвейеры, штабелеры и т.д. Выполняют различные технологические операции, перемещение предметов, обработку материалов.

Медицинские роботы
– наиболее известный хирургический робот «Да Винчи». Он управляется несколькими операторами хирургами. При его помощи проводят высокоточные операции. По своей сути это управляемый манипулятор. Обычно медицинские роботы совсем не похожи на людей. Также есть роботы, которые выполняют отдельные функции, например, массаж или внутривенные инъекции, терапевтические функции и прочее. Для более точечных операций идет разработка нано-роботов. Они смогут вводиться внутрь человеческого организма.

Бытовые роботы
– облегчают жизнь человеку. Это роботы, выполняющие функции секретаря, уборки помещений, роботы животные. Например робот-собачка, способная выполнять некоторые команды, роботы-пылесосы и другие.
Робот, которые обеспечивают безопасность.
— широко используются силовыми структурами. Это системы контроля доступом, автоматические устройства пожаротушения. МЧС и полиция используют беспилотники-дроны, подводных роботов для предотвращения пожаров и глубоководных работ.
Боевые роботы
Являются как правило дистанционно управляемыми и предназначены для замены человека в особо опасных и боевых ситуациях. Это роботы-минеры, роботы-саперы, роботы разведчики. Автономные боевые роботы пока находятся в стадии разработки.
Роботы учёные
– постепенно начинают использоваться для научных исследований и разработок. Для них используют все более совершенные алгоритмы управления. Роботы уже в состоянии проводить научные эксперименты, опыты, анализировать различные процессы, делать прогнозы и выдвигать теории. Эти роботы могут работать без перерыва, у них нет амбиций, они не могут обманывать и утаивать информацию. Также роботы лишены субъективной оценки своей работы.
Робот учитель
– может выполнять многие задачи, которые выполняет современный учитель. Он может читать вслух, общаться на многих языках, выдавать задания. Но пока не может распознавать эмоции человека, думать, как человек. Такой робот-учитель лишен индивидуального подхода к учащимся. У него сложности с мотивацией учеников и управлением классом.
Мы видим что различных типов роботов достаточно много и тому что такое робот можно дать много определений. Но пока у всех роботов отсутствует эмоциональная составляющая, пока это только управляемые программируемые механизмы. Этот перечень роботов далеко не полный. Каждый тип роботов также подразделяется на множество видов. С каждым годом мир роботов становится все больше и разнообразнее.
Существует множество способов определения различных типов и видов роботов. Как мы видим, возможные разногласия сильно различаются. Основная причина этих различий заключается в том, что разные ученые и преподаватели часто имеют разные взгляды на то, что следует преподавать в рамках «робототехники».
Например, некоторые преподаватели, которые преподают робототехнику, обычно сосредоточены в основном на промышленной робототехнике, полностью игнорируя сервисные роботы. Поэтому, говоря о типах и видах роботов, они обычно говорят о типах промышленных роботов. Для этого есть веская причина: огромное большинство инженеров-роботологов придется заниматься преимущественно промышленными роботами в своей карьере.
Тем не менее, промышленные роботы не единственные. Поэтому, как мы видим, при разделении роботов на типы это разделение должно быть достаточно широким, чтобы включать все, что можно понимать как робот.
Есть два возможных способа, как это можно сделать. Во-первых, вы можете разделить роботов на типы по их приложению, а во-вторых - по пути их перемещения (или нет). Мы признаем, что существуют и другие возможные способы разделения роботов на типы, но, на наш взгляд, эти два являются лучшими. Кроме того, мы предпочитаем использовать обе эти классификации вместе. Таким образом, на два вопроса о роботе уже будет дан ответ: «Что он делает?» и «Как это происходит?»
Типы роботов в Мире
В настоящее время роботы выполняют множество различных задач во многих областях, и количество заданий, возложенных на роботов, неуклонно растет. Вот почему, на наш взгляд, одним из лучших способов разделить роботов на типы является разделение по их приложению.
Какие бывают роботы:
Промышленные роботы.
Промышленные роботы - это роботы, используемые в промышленной производственной среде. Обычно это шарнирные рычаги, специально разработанные для таких применений, как сварка, обработка материалов, окраска и другие. Если мы судим исключительно по спросу, этот тип может также включать некоторые автоматизированные управляемые транспортные средства и другие роботы.
Бытовые роботы.
Бытовые роботы - это роботы, используемые дома. Этот тип роботов включает в себя множество совершенно разных устройств, таких как роботизированные пылесосы, роботизированные очистители для бассейна, подметальные машины, очистители желобов и другие роботы, которые могут выполнять различные обязанности. Кроме того, некоторые роботы наблюдения и телеприсутствия могут рассматриваться как бытовые роботы, если они используются в этой среде.
Медицинские роботы.
Медицинские роботы - это роботы, используемые в медицине и медицинских учреждениях. В первую очередь - хирургические роботы. Кроме того, некоторые автоматизированные управляемые транспортные средства и, возможно, подъем помощников.
Сервисные роботы.
Сервисные роботы - это роботы, которые не попадают в другие типы по использованию. Это могут быть разные роботы сбора данных, роботы, созданные для демонстрации технологий, роботов, используемых для исследований и т.д.
Военные роботы.
Военные роботы - это роботы, используемые в армии. Этот тип роботов включает роботы для уничтожения бомб, различные транспортные роботы, разведывательные беспилотники. Часто роботы, первоначально созданные для военных целей, могут использоваться в правоохранительных органах, поисково-спасательных и других смежных областях.
Развлекательные роботы.
Развлекательные роботы - это роботы, используемые для развлечения. Это очень широкая категория. Он начинается с игрушечных роботов, таких как robosapien или работающего будильника, и заканчивается настоящими тяжеловесами, такими как шарнирные рычаги робота, используемые в качестве симуляторов движения.
Космические роботы.
Мы бы хотели выделить роботов, используемых в космосе, как отдельный тип. Этот тип будет включать в себя роботы, используемые на Международной космической станции, Canadarm, которая использовалась в «Шаттлах», а также марсоходы и другие роботы, используемые в космосе.
Теперь, как вы можете видеть, есть примеры, которые вписываются в более чем один из этих типов. Например, может быть глубоководный исследовательский робот, который может собрать ценную информацию, которая может использоваться в военных целях.
Кинематика роботов и их типы
Как вы понимаете, приложение робота не предоставляет достаточной информации, когда речь идет о конкретном роботе. Например, промышленный робот - обычно, говоря о промышленных роботах, мы думаем о стационарных роботах в рабочей ячейке, которые выполняют определенную задачу. Все в порядке, но если на заводе есть AGV (Automated Guided Vehicle)? Это также роботизированное устройство, работающее в промышленной среде. Поэтому мы предлагаем использовать обе эти классификации вместе.
Итак, есть:
1. Стационарные роботы (в том числе роботизированные рукава с глобальной осью движения)
1.1 Картезианские / козловые роботы
1.2 Цилиндрические роботы
1.3 Сферические роботы
1.4 роботы SCARA
1.5 Сочлененные роботы (роботизированные руки)
1.6 Параллельные роботы
2. Колесные роботы
2.1 Одноколесные (шаровые) роботы
2.2 Двухколесные роботы
2.3 Три и более колесных роботов
3. Легкие роботы
3.1. Двуногие роботы (роботы-гуманоиды)
3.2 Роботы-роботы
3.3 четвероногих роботов
3.4 гексаподобные роботы
3.5 другое количество ножек
4. Плавающие роботы
5. Летающие роботы
6. Мобильные сферические роботы (роботизированные шарики)
7. Рой-роботы
8. Другие..
Хотите узнать о других? Да, есть и другие. Например, змееподобные роботы. Есть много областей исследований, которые занимаются различными инновационными типами роботов. Когда-нибудь они будут очень полезны. Тем не менее, теперь мы будем использовать их под типом «другие».
Конечно, ничего из этого не вырезано в камне, особенно в робототехнике, где все меняется почти ежемесячно в наши дни. Тем не менее, по-нашему, эти типы классификации делают свою работу достаточно хорошо.
Ни одно человеческое творение не вызывает такой смеси восхищения и страха: мы хотим, чтобы благодаря роботам наша жизнь стала легче и безопаснее, но не можем полностью им довериться. Мы создаем их по своему подобию, но боимся, что они нас заменят. Издание Wired собрало всю информацию о роботах: об истории их развитии, основных принципах работы и дальнейшем будущем.
История роботов
Значение слова «робот» с самого начала было непонятным. Этот термин впервые появился в 1921 году в пьесе чешского драматурга Карела Чапека R.U.R («Россумские универсальные роботы»). Слово «робот» происходит от чешского слова, обозначающего «тяжелая работа» или «каторга». Правда у Чапека роботы были не из металла, а из искусственных тканей. Выглядели они как люди и были гораздо эффективнее обычного человека. В итоге они восстали против своих создателей.
Благодаря этой пьесе появился популярный образ «машины, которой нельзя доверять», который используется в литературе и кино до сих пор (например, в «Терминаторе», «Бегущем по лезвию» и других произведениях). Но в поп-культуре есть и добрые роботы - например, робот-домработница Рози из мультсериала «Джетсоны» и главный герой фильма «Двухсотлетний человек» в исполнении Робина Уильямса.
«Россумские универсальные роботы». Фото: Alamy
Реальное определение слова «робот» неоднозначно, как и все эти вымышленные образы. Каждый инженер-робототехник даст вам свое значение этого термина. Но все специалисты сходятся в одном: робот - это умная машина, которая может самостоятельно выполнять задания и взаимодействовать с окружением.
Управляемый дрон не является роботом. Но если он умеет сам взлетать, подниматься и избегать преграды, то он становится ближе к роботам. Главное в роботах - их автономность и умение ориентироваться в пространстве.
Первые роботы, отвечавшие этим принципам, появились только в 1960-х годах. Компания SRI International разработала первого мобильного робота Shakey , который мог анализировать окружение. Робот был медленным и неуклюжим, однако благодаря своей камере и датчикам столкновения мог навигировать в сложном пространстве. Машина выглядела довольно неуверенно, но обозначила революцию в сфере робототехники.
 Так выглядел Shakey. Фото: Ralph Crane/Getty Images
Так выглядел Shakey. Фото: Ralph Crane/Getty Images
Примерно в это же время роборуки начали менять сферу производства. Одной из первых была роборука Unimate , которая занималась сборкой автомобилей. Сейчас ее потомки работают на автомобильных заводах, выполняя скучные и опасные задачи быстрее и точнее людей. Хоть они стоят на месте, они все равно попадают под определение робота, потому что представляют собой умные машины, которые умеют анализировать и взаимодействовать с окружением.
В основном роботы продолжали оставаться в лабораториях и на фабриках, где либо катались туда-сюда, либо поднимали тяжелые предметы. Затем в середине 1980-х Honda запустила программу разработки гуманоидных роботов. Компания сделала робота P3, который мог неплохо передвигаться на двух ногах, а также махать и пожимать руку. Затем появился знаменитый двуногий робот Asimo, который однажды сыграл в футбол с бывшим президентом США Бараком Обамой.
 Asimo. Фото: Redux
Asimo. Фото: Redux
Как устроены роботы
В основе большинства роботов лежат три технологии: сенсоры, приводы и .
Для начала поговорим о сенсорах. Роботы, работающие в доставке еды , могут перемещаться по улицам во многом благодаря гонке беспилотных автомобилей Darpa Grand Challenge 2004. Как и автомобили, такие роботы используют технологию лидаров, которая выстраивает 3D-карту окружения с помощью лазеров. Частные компании стараются обогнать друг друга в разработке беспилотных автомобилей, из-за чего стоимость такой технологии упала до такого уровня, что сейчас создание робота, умеющего ориентироваться в пространстве, требует относительно мало затрат.
Технология лидаров часто используется вместе с машинным зрением, которое обеспечивается за счет 2D и 3D-камер. Вспомните, как Facebook автоматически распознает лица пользователей на фотографии. Точно так же работает и машинное зрение у роботов. Сложные алгоритмы позволяют им распознавать определенные объекты и не врезаться в людей.
 Марсоходы катаются по Марсу с 1997 года. Разумеется, с тех пор они стали более продвинутыми. Сейчас, например, марсоход Curiosity (справа на фото) может раскалывать камни лазером. Фото: NASA
Марсоходы катаются по Марсу с 1997 года. Разумеется, с тех пор они стали более продвинутыми. Сейчас, например, марсоход Curiosity (справа на фото) может раскалывать камни лазером. Фото: NASA
Внутри каждого робота есть еще один секретный ингредиент - привод. Этим словом называют комбинацию электрического мотора и коробки передач. От привода зависят силы робота и плавность его движений. Он есть как в маленьких роботах-уборщиках Roomba, так и в мощных роборуках и беспилотных автомобилях.
В некоторых роботах - а именно в - привод работает совсем иначе. Мягкие роботы двигаются благодаря перемещениям накачанного в них воздуха или масла. Такая технология создает более плавные и естественные движения.
 Фото: Roomba
Фото: Roomba
Говоря о роботах, нельзя не упомянуть работы стартапа Boston Dynamics. Одной из их работ был робот-гуманоид , разработанный в рамках конкурса Darpa Robotics Challenge в 2013 году. Сначала ученые смогли научить его выполнять только совсем примитивные задачи, например, поворачивать вентили или открывать двери. Спустя годы, Atlas превратился в настоящее чудо инженерии, которое умеет делать сальто лучше обычного человека. Boston Dynamics также работает над роботом , который пугающе ловко может вставать на четыре лапы после того, как его пнул человек. А все благодаря хорошему приводу.
Роботы начинают не только увереннее держаться на ногах, но и становятся умнее. Интеллект важен для роботов так же, как и для людей. Если вы видите яблоко и не можете определить, настоящее оно или искусственное, пока не сунете его себе в рот, то значит, что вы не очень умны. Робототехники стремятся научить роботов осязанию, например, компания SynTouch разработала механические пальцы, которые умеют определять самые разные тактильные ощущения - от температуры до шероховатости.
Сенсоры становятся дешевле, как и процессоры необходимые для работы ИИ. Благодаря развитию игровой индустрии и графические процессоры помогают роботам выполнять сложные вычисления не в облаке, а локально. Благодаря им роботы вроде Kuri могут использовать машинное зрение и узнавать вас в лицо. Разумеется, чтобы вам помочь, а не выследить.
Словарь терминов робототехники
- Человеко-машинное взаимодействие - раздел робототехники, изучающий взаимодействия между людьми и машинами. Если беспилотный автомобиль увидит знак стоп и нажмет на тормоза в последний момент, он напугает и пешеходов, и пассажиров. Изучение человеко-машинного взаимодействия помогает инженерам создавать мир, где люди и машины живут в гармонии и не мешают друг другу.
- Сингулярность - гипотеза о том, что однажды машины станут настолько умнее людей, что настанет экзистенциальный кризис.
- Мультипликативность - идея, согласно которой искусственный интеллект не заменит людей, а будет их дополнять.
- Привод - обычно комбинация электрического двигателя и коробки передач. Большинство роботов работает на приводе.
- Мягкие роботы - вид роботов, сделанных не из традиционных, а более мягких материалов. Двигаются такие роботы благодаря закачке воздуха или масла.
- Лидар - специальная система, которая создает 3D-карту окружения с помощью лазеров и позволяет роботу ориентироваться в пространстве. Крайне важна как для беспилотных автомобилей, так и для рабочих роботов.
- Гуманоидный робот - классический робот из научной фантастики. Сделать такого робота, пожалуй, сложнее всего, из-за того что подобной конструкции тяжело ходить и балансировать на двух ногах. Однако гуманоидные роботы могут пригодиться при выполнении спасательных операций в опасных для людей зонах, например, внутри ядерного реактора.
Будущее роботов
В нашем мире появляется все больше продвинутых машин, но на самом деле, чтобы роботы были действительно полезными, им нужно стать более самодостаточными. Невозможно научить домашнего робота правильно обращался с любым объектом, который ему может попасться. Для этого нужно, чтобы робот мог учиться всему сам, а значит развивать его искусственный интеллект.
Возьмем, к примеру, робота по имени Brett. Ученые из лаборатории Калифорнийского университета в Беркли научили его решать детские головоломки, где нужно подбирать предметы нужной формы. Никто не объяснял ему, что квадратная деталь помещается только в квадратное отверстие. Робот научился выполнять эту задачу методом проб и ошибок. Да, этот метод очень медленный, но позволяет роботам приобретать новые навыки и адаптироваться к меняющимся условиям.
 Фото: Boston Dynamics
Фото: Boston Dynamics
Пока что людям приходится приглядывать за роботами, чтобы те, например, не утопились в фонтане . Возможно, роботов нужно научить звать на помощь людей. Кстати, некоторые уже умеют это делать, например, медицинский робот Tug, совершающий обход в больницах по ночам. Он может сообщить оператору, что на его пути попалось препятствие, которое не может обойти.
Быстро развивающиеся отношения между людьми и роботами породили собственный раздел робототехники, посвященный человеко-машинному взаимодействию . Можно научить роботов жить с людьми, но сложнее приучить последних ладить с машинами.
Человечество фактически вывело новый вид и начинает немного о нем жалеть. Что если роботы заберут у нас работу? Особенно это касается офисных работников, которым не потягаться со сверхразумным искусственным интеллектом.
Многие люди боятся сингулярности - гипотетического момента, когда машины превзойдут людей и человечество устареет. Пока что эта проблема кажется надуманной, но сейчас самое время о ней поразмыслить. Пока что роботы обладают ограниченными возможностями, но стоит задуматься, сколько власти им стоит давать. В Сан-Франциско, например, уже обсуждают идею налога на роботов, который придется платить компаниям, где роботы заменили живых работников.
Роботы могут изменить буквально каждый аспект человеческой жизни - от здравоохранения и транспорта до труда. Должны ли роботы помогать нам водить машину? Непременно. Должны ли они заменить медсестер и полицейских? Вряд ли - некоторые профессии лучше доверить людям.
Одно совершенно ясно - машины уже среди нас. Осталось разобраться, как быть с ответственностью за создание нового вида существ.
Материалы


