Системы машинного зрения. Машинное зрение. Введение. Достоинства и недостатки систем машинного зрения
Машинное зрение по своей сути предполагает анализ визуальной информации для дальнейшего принятия решения, какое действие совершить по отношению к объекту, который находится в фокусе. Простейший пример использования технологии: проверка состояния изделия на конвейере или перед отправкой посылки почтой. Также нередко машинное зрение используется для оценки качества печатных плат, моментально сравнивая каждый новый продукт с эталонной платой перед автоматическим переносом на следующий этап сборки. Эти технологии представляют собой бесценный ресурс для оценки качества и снижения уровня брака там, где человеческий глаз и мозг просто не в состоянии дать объективную оценку из-за необходимости просматривать одинаковые предметы сотни или тысячи раз в день.
Вычислительная потребность «машинного зрения»
По мере роста разрешения оптических систем потенциал машинного зрения также увеличивается, так как вместе с разрешением множится и количество деталей для оценки. Все более и более мелкие объекты могут быть обработаны по шаблонному принципу, что ведет к увеличению нагрузки на процессор, который должен проанализировать значительный массив данных и быстро принять решение о следующем шаге (соответствует/не соответствует, задержать, вернуть в начало и т. д.). Например, при сортировке овощей простые решения о соответствии и размере оказываются уже неподходящими, потому что стандарты разных стран отличаются, а качество продукции варьируется в зависимости от сезона. Чтобы минимизировать количество брака для производителя и одновременно обеспечить нужное качество для потребителя необходимы более детальные алгоритмы и категории — а это практически невыполнимая задача для человеческих глаз и мозга.
Скажем, существует датская фирма Qtechnology, которая поставляет «умные камеры» для сортировки овощей. Они способны без участия человека обрабатывать до 25 тонн продукции в час. Такие объемы достигаются за счет анализа свыше 250 000 отдельных продуктов на базе более чем 500 000 изображений. И поскольку каждая картинка занимает примерно 6,2 Мб, получается, что в итоге требуется анализ свыше 2,5 терабайт графических данных в час — колоссальный объем информации! Только для передачи такого массива потребуется более 6 часов при использовании гигабитного подключения Ethernet.
Чтобы решить эту задачу с использованием более простых алгоритмов, требуется разбить ее на стадии и установить несколько камер, увеличить зоны освещения, выделить больше места на фабриках и так далее. В качестве альтернативы можно применить более производительные вычислительные системы: с централизованной мощностью и более скоростным соединением или распределенной обработкой информации «умными камерами», которые будут фиксировать данные в реальном времени на каждом этапе, поставляя в финальный механизм принятия решений только готовые параметры.
В стандартных системах визуального контроля качество и безопасность продуктов чаще всего определяются по внешним физическим признакам, таким как текстура и цвет. Гиперспектральная съемка дает пищевой промышленности возможность оценивать продукты по дополнительным химическим и биологическим параметрам, позволяющим определить уровень сахара, жира, жидкости и количество бактерий в каждом продукте.
 При гиперспектральной визуализации трехмерные наборы пространственной и спектральной информации получаются из каждого пикселя. Дополнительные спектральные характеристики дают более подробное описание параметров, позволяя осуществлять их классификацию. Трехмерные наборы включают в себя интенсивность (отраженный или пропускаемый свет) каждого пикселя, которая высчитывается при измерении длины всех видимых волн света, в результате каждый набор данных несет в себе массу информации. Этот объем информации отражает экспоненциальный рост в вычислительной задаче для проведения качественного и количественного анализа состояния продукта в реальном времени.
При гиперспектральной визуализации трехмерные наборы пространственной и спектральной информации получаются из каждого пикселя. Дополнительные спектральные характеристики дают более подробное описание параметров, позволяя осуществлять их классификацию. Трехмерные наборы включают в себя интенсивность (отраженный или пропускаемый свет) каждого пикселя, которая высчитывается при измерении длины всех видимых волн света, в результате каждый набор данных несет в себе массу информации. Этот объем информации отражает экспоненциальный рост в вычислительной задаче для проведения качественного и количественного анализа состояния продукта в реальном времени.
Применение гетерогенных вычислений
Для удовлетворения запросов, а также решения будущих задач, необходимы высокопроизводительные и масштабируемые вычислительные системы.
Упомянутая Qtechnology использует гибридные процессоры APU компании AMD в платформах «умных камер». Эти процессоры сочетают в себе GPU (графический процессор) и CPU (центральный процессор) на одном кристалле. В результате система имеет возможность отправлять на обработку массивы графических данных непосредственно на GPU без какой-либо задержки на передачу между компонентами. А CPU получает возможность обрабатывать без задержек другие задачи, повышая производительность всей системы в реальном времени и обеспечивая необходимую мощность для современных требований систем с машинным зрением.
 Объединение разных вычислительных модулей на одном кристалле или в одной системе позволяет передать каждому элементу соответствующую ему нагрузку — и это основа гетерогенных вычислений. Консорциум Heterogeneous System Architecture (HSA) Foundation был основан в 2012 году, чтобы сформулировать открытые отраслевые спецификации для процессоров и систем, которые используют все доступные вычислительные элементы для повышения конечной эффективности. Компания AMD продвигает концепцию гетерогенных вычислений, суть которой заключается в совместном использовании всех вычислительных ресурсов системы: как центральных, так и графических процессоров.
Объединение разных вычислительных модулей на одном кристалле или в одной системе позволяет передать каждому элементу соответствующую ему нагрузку — и это основа гетерогенных вычислений. Консорциум Heterogeneous System Architecture (HSA) Foundation был основан в 2012 году, чтобы сформулировать открытые отраслевые спецификации для процессоров и систем, которые используют все доступные вычислительные элементы для повышения конечной эффективности. Компания AMD продвигает концепцию гетерогенных вычислений, суть которой заключается в совместном использовании всех вычислительных ресурсов системы: как центральных, так и графических процессоров.
В частности, GPU представляет собой модуль параллельных вычислений, который может легко применять одни и те же инструкции для больших наборов данных (в нашем случае — пикселей) одновременно; и это именно то, что необходимо компаниям для работы установок с машинным зрением. К тому же производительность системы может быть увеличена за счет объединения возможностей APU с внешней дискретной видеокартой. Такой подход позволяет компаниям при необходимости добавлять вычислительные ресурсы GPU для поддержки еще более сложных задач машинного зрения.
Обширная поддержка экосистемой архитектуры x86 позволяет компаниям использовать библиотеки для обработки изображений с открытым кодом или подключать решения от сторонних компаний, такие как OpenCV, Mathworks Matlab и Halcon. Инструменты отладки, анализаторы задержек и профилировщики (perf, ftrace) сегодня так же широко доступны. Машинное зрение представляет собой самый свежий пример использования вычислительной мощности полупроводников для сокращения затрат, ускорения производства, повышения качества и получения ряда других полезных преимуществ, используемых во многих приложениях и отраслях. Таким образом, благодаря инновациям и успешным идеям инженеров по встраиваемым решениям возникает положительный эффект в целом для экономики, культуры и каждого из нас в частности.
Казалось бы, все компьютеры одинаковые и могут решать любые задачи. Но это не совсем так. Еще в прошлом веке в компьютерной индустрии стало активно развиваться направление промышленных компьютеров, отличающихся от «офисных» собратьев более компактным и прочным механическим конструктивом, широкими возможностями расширения (платы ввода/вывода сигналов) и длительным сроком жизни систем и компонентов, их составляющих. С течением времени произошла более глубокая специализация, выделились линейки промышленных компьютеров для конкретных прикладных областей - так, для эффективного решения проблем машинного зрения появились компьютеры с дополнительными функциями, значительно облегчающими задачи инженерам-разработчикам и повышающими эксплуатационные характеристики системы (рис. 1).
Рис. 1. Классификация компьютеров
Вот лишь неполный список требований для работы в приложениях машинного зрения и видеонаблюдения, которым должно соответствовать оборудование:
- соответствующие международным стандартам высокопроизводительные интерфейсы для подключения камер GigE/PoE и USB3, слот расширения для установки фреймграббера CameraLink или CoaXpress;
- широкий выбор процессоров достаточной мощности с графическими сопроцессорами и высокопроизводительными наборами микросхем (chipset), способными обрабатывать большие потоки данных;
- цифровые, легко программируемые линии для подключения датчиков и синхронизации камер и осветителей;
- установка нескольких, в том числе быстросъемных, накопителей, организация RAID-массивов для высокоскоростной записи видеопотоков и хранения больших объемов данных;
- промышленные интерфейсы для подключения внешних устройств: RS-232/485, CAN;
- прочный компактный механический конструктив с минимумом подвижных компонентов, для обеспечения надежной работы и длительного срока службы в сложных условиях эксплуатации.
Очевидно, что в большинстве промышленных, а тем более в офисных компьютерах многие из этих функций избыточны, но в системах машинного зрения они являются определяющими.
Одним из представителей данного направления в компьютерной индустрии стала компания Neousys Technologies (Тайвань), продукция которой с самого начала была предназначена для работы с камерами машинного зрения и видеонаблюдения. Для того чтобы более подробно ознакомиться с особенностями вычислительных платформ для различных приложений, определим основные области применения современных цифровых видеокамер. Итак, можно выделить несколько групп приложений:
- промышленные системы машинного зрения;
- системы распознавания;
- интеллектуальные системы управления движением (ITS);
- мобильные системы на транспорте.
Теперь рассмотрим требования к вычислительной системе в каждом случае.
Промышленные системы машинного зрения
Промышленные системы машинного зрения, пожалуй, самый разнообразный по количеству и типу задач класс систем. Тем не менее, можно выделить важные особенности:
- возможность подключения нескольких камер;
- высокая скорость регистрации, до нескольких сот кадров в секунду;
- богатый функционал управления настройками камер и подсветки;
- широкие возможности синхронизации с датчиками;
- значительные объемы накопителей для архивации данных.
Поскольку в большинстве случаев камера расположена рядом с компьютером, хорошим выбором для ее подключения будет USB3-интерфейс. Он обеспечит и питание камеры, и возможность захвата изображений с высокой скоростью и разрешением (FullHD - более 150 кадр/с).

Рис. 2. Компьютер из линейки РОС-200
С задачами начального уровня вполне справятся компьютеры на базе современного четырехъядерного процессора Atom E3845, оснащенного, помимо всего прочего, достаточно мощным графическим сопроцессором и аппаратным кодеком. В линейке Neousys это ставшая бестселлером серия POC-200 (рис. 2). В распоряжении разработчика два GigE/PoE-интерфейса и три высокоскоростных USB3. В компактный корпус может быть установлен (а при необходимости легко заменен) SATA HDD/SDD-накопитель стандартного 2,5” формата. Для подключения внешних устройств предусмотрена пара универсальных портов RS-232/485 в дополнение к двум стандартным RS-232. И наконец, несколько быстрых, легко программируемых цифровых линий для подключения кнопок управления, датчиков и выдачи сигналов, например на отбраковку или сигнальную колонну. Все это упаковано в компактном корпусе в четверть листа A4, выдерживающем нагрузки до 5 Grms/500 Гц с рабочим диапазоном температур от –25 °С (по заказу от –45 °С).
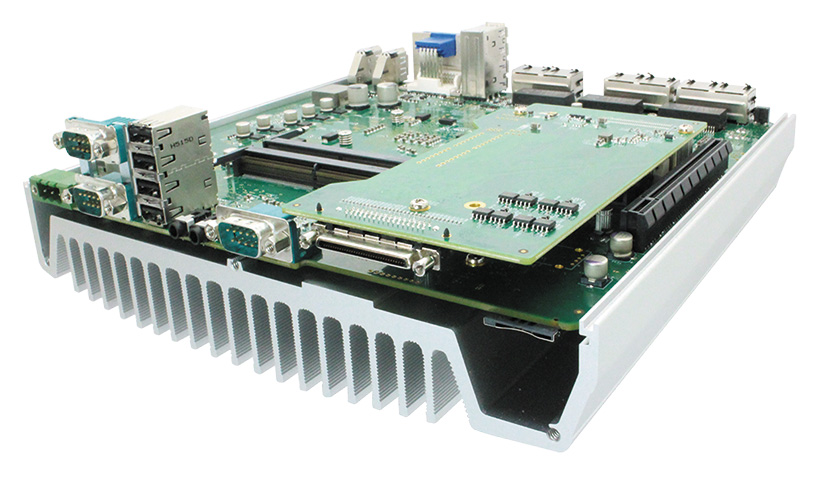
Рис. 3. Компьютер Nuvo 5000
Особенность всех компьютеров Neousys - наличие солидного радиатора как составной части корпуса, что стало следствием безвентиляторной (fanless) конструкции машины. Процессор в буквальном смысле приклеен к мощному радиатору. Этот подход хоть и влечет за собой некоторое увеличение массы и габаритов изделия, но является результатом серьезной инженерной проработки для достижения долговечности и механической прочности за счет отсутствия вращающихся компонентов, которые становятся одной из наиболее вероятных причин отказа техники. Нельзя не отметить, что разработчики компьютеров Neousys, помимо чисто инженерных задач, сумели создать изделие с привлекательным промышленным дизайном.

Рис. 4. Компьютеры из серии Nuvo-6000
Neousys Technologies научилась обходиться без вентиляторов не только в системах с младшими процессорами Intel Atom и Celeron, но и с вычислителями верхнего эшелона - i5/i7 шестого поколения Skylake. Сегодня флагман компании, серия компьютеров Nuvo 5000, удостоенный награды специализированного издания Vision Systems Innovators Awards 2016, способен решать самые сложные задачи машинного зрения. Оснащенный мощными процессорами компьютер Nuvo-5000 (рис. 3) сохраняет и развивает выдающиеся способности младших линеек. В увеличившемся, но, тем не менее, оставшимся компактным корпусе можно разместить уже два 2,5” накопителя и организовать их в массив RAID 0/1, оснастив один из накопителей разъемом для горячей замены. Количество портов для подключения камер легко увеличивается до 10. Запатентованная технология MezIO предлагает гибкой механизм расширения возможностей ввода/вывода сигналов управления, индикации и промышленных коммуникационных интерфейсов.

Рис. 5. Отсек расширения для установки двух или шести слотов расширения (серия Nuvo-6000)
В ряде случаев, помимо собственно машинного зрения, компьютеры должны решать задачи классической промышленной автоматики. Ключевым моментом тут становится наличие слотов расширения PCI/PCIe. Для таких приложений лучший вариант - компьютеры серии Nuvo-6000 (рис. 4). Оставаясь по-прежнему надежным компактным безвентиляторным компьютером, машина дополнена отсеком с двумя или шестью слотами расширения (рис. 5). В отсеке установлен вентилятор и система управления для создания комфортных условий работы встраиваемых плат ввода/вывода.
Системы распознавания

Рис. 6. Компьютер Nuvo-5095
Для ответа на вызовы нынешнего дня создаются все более совершенные системы безопасности, в которых ключевым элементом становятся алгоритмы распознавания. Помимо систем безопасности, эти технологии находят применение в коммерческих проектах, например для изучения демографического состава покупателей в торговле, сортировки отходов и других применениях. Современные камеры машинного зрения позволяют получать изображения все большего разрешения и лучшего качества. Разрешение FullHD (2 Мп) распространено в массовом сегменте, 4K (12 Мп) пробует себя в наиболее сложных задачах. Нужно отметить, что объем обрабатываемых данных растет в геометрической прогрессии. Для самых требовательных к вычислительным способностям приложений предлагается адаптированная для установки графических ускорителей nVidia версия компьютера Nuvo-5095 (рис. 6). Но тут уже без вентилятора для nVidia GeForce GTX 950 или GTX 1050, установленного в кассету расширения компьютера, не обойтись. При этом центральный процессор по-прежнему довольствуется пассивным радиатором. В комплексе система с уникальным графическим CUDA-сопроцессором сохранила работоспособность в диапазоне температуры окружающего воздуха от –25 до +60 °С (процессоры i7-6700TE, i5-6500TE, 35ВтTDP).
Интеллектуальные системы управления трафиком ITS
Интеллектуальные системы управления трафиком, в частности устанавливаемые на нагруженном перекрестке, - пожалуй, самые взыскательные к количеству подключаемых камер. Необходимо в одном месте получать и обрабатывать изображения, переданные с нескольких точек обзора. Задачу инсталляторам упрощает промышленный компьютер с б?льшим, чем обычно, количеством портов для подключения камер. Обычно в подобных системах используются камеры с интерфейсом Ethernet/PoE. В линейке Neousys представлена отвечающая таким требованиям модель Nuvo-3616, которая оснащена 16 (!) портами IEEE 802.3at PoE+, четырьмя накопителями с возможностью быстрой замены и организации массивов RAID 0/1/5/10 емкостью до 8 Тбайт.
Мобильные системы на транспорте

Рис. 7. Компьютеры, предназначенные для работы в транспортных средствах: Nuvo-5100VTC и Nuvo-2500 (на ближнем плане)
Современные транспортные средства, особенно коммерческого назначения, будь то грузовик, трактор, комбайн или локомотив, сегодня массово оснащаются компьютеризированными комплексами, призванными повысить безопасность и эффективность их работы. Помимо уже описанных функций, компьютерные платформы, предназначенные для работы на транспорте, должны отвечать еще более жестким требованиям и иметь дополнительные интерфейсы. Специально для таких применений создана версия компьютера Neousys 5100VTC (рис. 7). Она успешно прошла международную сертификацию для применения на железнодорожном транспорте EN 50155. В дополнение к стандартным функциям компьютеров серии Nuvo-5000, она оснащена интерфейсом для контроля цепи зажигания и CAN, что упрощает ее установку в современный автомобиль. Специальная версия Ethernet-разъемов M12 повышает надежность присоединения кабелей от камер в условиях тряски. Дополнительные слоты miniPCI предназначены для установки модулей системы географической локации GPS/GLONASS и сотовой связи 3G/4G с удобным внешним гнездом для SIM-карты.
Для автомобильных систем с более скромными требованиями к вычислительным способностям платформы отлично подойдет компактная версия компьютера с контролем зажигания и CAN-интерфейсом - Nuvo-2500 на базе достаточно мощного четырехъядерного процессора Atom 3845.
В заключение можно отметить, что выбор правильной платформы, содержащей все необходимые компоненты для приложения машинного зрения, в значительной степени определяет ее эксплуатационные характеристики и надежность выполнения алгоритмов обработки изображений. И если для создания математической начинки вполне подойдут офисные компьютеры, то при внедрении систем в эксплуатацию необходимо самым тщательным образом подойти к выбору вычислительной платформы, чтобы инвестиции в разработку программного обеспечения не оказались напрасными.
Обзор рынка технологий компьютерного зрения
овременный мир компьютерных систем сложно представить без технологий машинного, или компьютерного, зрения. В статье «Зачем компьютеру зрение?» (КомпьютерПресс № 5’2002) была рассмотрена история становления этой технологии и дан обзор ряда ее приложений. Безусловно, в статье описана лишь малая часть приложений из широкого спектра применяемых систем машинного зрения, и в следующих номерах мы еще вернемся к рассмотрению этой весьма интересной и стремительно развивающейся области знаний. Да, именно стремительно развивающейся. Ведь этой технологии всего около 50 лет, что по меркам многих точных наук не выходит за рамки периода становления. Наращивая свой научный и практический потенциал параллельно с совершенствованием вычислительной и регистрирующей техники, компьютерное зрение постепенно завоевывает все новые технологические рубежи. Высокопроизводительные вычислительные машины последнего поколения (к ним относятся и современные персональные компьютеры) уже позволяют решать многие задачи обработки потоков цифровой видеоинформации и принятия решения в режиме реального времени. И сегодня, порой незаметно для большинства из нас, компьютерное зрение достаточно прочно закрепляется во многих областях жизнедеятельности человека, помогая ему, а подчас заменяя его, избавляя от монотонного, рутинного или, нередко, связанного с риском для жизни труда.
Ни для кого не секрет, что компьютерное зрение как технология получило наиболее широкое, полное и всестороннее развитие на Западе, особенно в США, в Южной Корее и в Японии. Связано это прежде всего с мощной финансовой поддержкой этого направления со стороны правительства и инвесторов, прогнозирующих за ним большое будущее. Причем правительство в основном поддерживает развитие технологии в общеобразовательных центрах, а инвесторы обеспечивают поддержку частным высокоперспективным компаниям. Наиболее яркими примерами таких хорошо финансируемых научных центров могут служить Лаборатория Искусственного Интеллекта Массачусетсского Технологического Института (MIT Artificial Intelligence Laboratory), UC Berkeley Computer Vision Group, Vision and Autonomous Systems Center Университета Корнеги-Меллона, Stanford Vision Laboratory и ряд других. Примерами поддерживаемых частных компаний могут служить такие компании, как Visionics, Eyematic и др. Всего на Интернет-сайте, объединяющем разработчиков в области машинного зрения, - Computer Vision Home Page (http://www.2.cs.cmu.edu/afs/cs/project/cil/ftp/html/txtvision.html) - зарегистрировано около 200 групп и научных лабораторий, работающих над данной проблематикой. Следует отметить, что этим не исчерпывается круг организаций, занимающихся компьютерным зрением, так как существует большое количество коммерческих фирм, специализирующихся в области машинного зрения и обработки изображений. Информацию о них можно найти на специализированных тематических Интернет-сайтах, посвященных отдельным направлениям данной технологии. Иными словами, разработчики различных технологий внутри самой технологии компьютерного зрения как бы объединяются в клубы по интересам. Например, интересующиеся достижениями в области распознавания жестов могут найти достаточно подробную информацию об исследованиях, исследовательских группах, коммерческих приложениях, патентах на соответствующем специализированном Интернет-сайте - Gesture Recognition Home Page (http://www.cybernet.com/~ccohen/gesture.html). Там же можно скачать некоторые демонстрационные приложения и ознакомиться с последними научными публикациями. Если же читатель предпочитает заняться технологиями, связанными с распознаванием лиц, то ему прямая дорога в виртуальный клуб на другом Интернет-сайте - Face Detection and Recognition Home Page (http://home.t-online.de/home/Robert.Frischholz/face.htm).
Следует отметить, что все перечисленное выше приводит к быстрому росту и совершенствованию технологий компьютерного зрения. В настоящее время зарубежные научно-исследовательские и коммерческие центры привлекают большое количество ученых и высококвалифицированных программистов, проводят распараллеленные исследования в различных областях машинного зрения, добиваясь достаточно весомых результатов.
Россия, как полноправный член мирового экономического сообщества, не осталась в стороне от этого процесса. Вот уже несколько лет на российском технологическом рынке также наблюдается тенденция повышения интереса к проблемам компьютерного зрения, причем как со стороны руководителей ряда IT-компаний и компаний, работающих на рынке безопасности, так и со стороны потребителей (пользователей) и студентов, желающих специализироваться в этой области. Реакцией на этот интерес стало появление лабораторий, групп и коммерческих структур, ставящих перед собой задачу разработки различного рода технологий и приложений для решения проблем машинного зрения. И если еще десятилетие назад мы были в роли догоняющих, то на сегодняшний день многие компании - лидеры в области передовых технологий стремятся на российский рынок с целью приобретения соответствующих технологий компьютерного зрения или размещения заказов на передовые исследования и разработки в этой области.
Этой теме и посвящена настоящая статья, целью которой является не только продемонстрировать наличие интереса к данной тематике со стороны российских и зарубежных товаропроизводителей, но и рассказать о ряде российских фирм, разрабатывающих программное обеспечение для различных систем обработки и анализа изображений.
Кто есть кто на российском рынке компьютерного зрения
сследование российского рынка разработчиков технологии машинного зрения показывает, что количество фирм, занимающихся компьютерным зрением, относительно невелико. Рассмотрим наиболее заметные из этих компаний и приведем краткое описание некоторых интересных технологий компьютерного зрения, которые поставляются ими на отечественный и мировой рынки.
Компания SPIRIT
К наиболее известным в мире фотограмметрическим системам относятся такие аппаратно-программные комплексы, как Leica и Intergraph, поставляемые вместе с мощными рабочими станциями. Это весьма дорогостоящие системы, и позволить их себе могут немногие компании. С развитием вычислительной техники все популярнее становятся менее дорогостоящие системы, позволяющие проводить обработку изображений на персональных компьютерах. Российские цифровые фотограмметрические системы «Талка» (http://www.talka-tdv.ru/), Photomod (фирма «Ракурс» (http://www.racurs.ru/)), Z-Space (ГосНИИАС), ЦФС ЦНИИГАиК (Роскартография) или «Фотоплан» (29-й институт Министерства обороны), не уступая, а порой превосходя в качестве обработки цифрового видеосигнала зарубежные аналоги, будучи при этом в десятки раз дешевле аналогичных зарубежных разработок. Рассмотрение характеристик и возможностей таких систем - предмет отдельной статьи.
Еще одно направление в области машинного зрения - построение систем распознавания символов. В данной статье мы лишь косвенно упомянули об этой области, в которой технологии компьютерного зрения можно считать сложившимися. В частности, мы рассмотрели лишь узкоспециализированные задачи, решаемые компаниями в рамках коммерческих проектов. Если же вести речь о сложившихся коммерческих продуктах и технологиях систем распознавания символов, то нельзя не упомянуть о крупнейших российских и мировых поставщиках данной технологии - компании ABBYY с серией программ FineReader и компании Cognitive Technologies с серией программ CuneiForm. Обзору технологий, поставляемых данными компаниями, посвящена не одна статья на страницах КомпьютерПресс. Информацию о достижениях этих компаний можно найти и в этом номере журнала. Поэтому, отдавая должное этим компаниям и их технологиям, мы лишь вскользь упоминаем о них в рамках данной статьи.
Подводя итог, можно с уверенностью заявить, что российские технологии компьютерного зрения не уступают, а во многом и превосходят зарубежные аналоги. Зачастую компаниям, развивающим эти технологии, не хватает всемирно известного имени. Поэтому и инвестиции в них, как правило, делают неохотно. Однако не вызывает сомнений, что высокий уровень технологий и высокая квалификация российских специалистов уже в недалеком будущем приведут к доминированию на мировом рынке именно российских технологий компьютерного зрения.
КомпьютерПресс 7"2002
Машинное зрение - это применение компьютерного зрения для промышленности и производства. Областью интереса машинного зрения, как инженерного направления, являются цифровые устройства ввода/вывода и компьютерные сети, предназначенные для контроля производственного оборудования, таких как роботы-манипуляторы или аппараты для извлечения бракованной продукции.
Machine vision is the study of methods and techniques whereby artificial vision systems can be constructed and usefully employed in practical applications. As such, it embraces both the science and engineering of vision.
Its study includes not only the software but also the hardware environment and image acquisition techniques needed to apply it. As such, it differs from computer vision, which appears from most books on the subject to be the realm of the possible design of the software, without too much attention on what goes into an integrated vision system (though modern books on computer vision usually say a fair amount about the "nasty realities" of vision, such as noise elimination and occlusion analysis).
Машинное зрение в настоящее время.
В настоящее время существует четкая граница между так называемым монокулярным и бинокулярным компьютерным зрением. К первой области относятся исследования и разработки в области компьютерного зрения, связанные с информацией, поступающей от одной камеры или от каждой камеры отдельно. Ко второй области относятся исследования и разработки, имеющие дело с информацией, одновременно поступающей от двух и более камер. Несколько камер в таких системах используются для измерения глубины наблюдения. Эти системы называются стереосистемами.
К настоящему моменту теория компьютерного зрения полностью сложилась как самостоятельный раздел кибернетики, опирающийся на научную и практическую базу знаний. Ежегодно по данной тематике издаются сотни книг и монографий, проводятся десятки конференций и симпозиумов, выпускается различное программное и аппаратно-программное обеспечение. Существует ряд научно-общественных организаций, поддерживающих и освещающих исследования в области современных технологий, в том числе технологии компьютерного зрения.
Основные задачи машинного зрения
В целом, в задачи систем машинного зрения входит получение цифрового изображения, обработка изображения с целью выделения значимой информации на изображении и математический анализ полученных данных для решения поставленных задач.
Однако машинное зрение позволяет решать множество задач, которые условно можно разделить на четыре группы (Рис.2) [Лысенко, 2007] :
Рис.2.
· Распознавание положения
Цель машинного зрения в данном применении - определение пространственного местоположения (местоположения объекта относительно внешней системы координат) или статического положения объекта (в каком положении находится объект относительно системы координат с началом отсчета в пределах самого объекта) и передача информации о положении и ориентации объекта в систему управления или контроллер. Примером такого приложения может служить погрузочно-разгрузочный робот, перед которым стоит задача перемещения объектов различной формы из бункера. Интеллектуальная задача машинного зрения заключается, например, в определении оптимальной базовой системы координат и ее центра для локализации центра тяжести детали. Полученная информация позволяет роботу захватить деталь должным образом и переместить ее в надлежащее место.
Измерение
В приложениях данного типа основная задача видеокамеры заключается в измерении различных физических параметров объекта. Примером физических параметров может служить линейный размер, диаметр, кривизна, площадь, высота и количество. Пример реализации данного задачи - измерение различных диаметров горлышка стеклянной бутылки.
Инспекция
В приложениях, связанных с инспекцией, цель машинного зрения - подтвердить определенные свойства, например, наличие или отсутствие этикетки на бутылке, болтов для проведения операции сборки, шоколадных конфет в коробке или наличие различных дефектов.
Идентификация
В задачах идентификации основное назначение видеокамеры - считывание различных кодов (штрих-кодов, 2D-кодов и т. п.) с целью их распознавания средствами камеры или системным контроллером, а также определение различных буквенно-цифровых обозначений. Кроме того к задачам данной группы можно отнести системы, выполняющие задачи безопасности, такие как идентификация личности и техники, детекторы движения.
Исходя из задач, которые решает машинное зрение, можно выделить множество областей применения машинного зрения. Однако стоит отметить, что сегодняшняя структура спроса определяется пока еще ограниченными возможностями современных систем машинного зрения.
Ниже приведена структура рыночного спроса по проектной тематике (Рис.3) [Бобровский, 2004] :

Рис.3.
· 50% всех систем машинного зрения эксплуатируются в задачах контроля качества, т.е. решают инспекционные задачи машинного зрения. Это прежде всего визуальный контроль за процессом сборки, цветом и качеством поверхности продукции, внешним видом и чистотой упаковки, правильностью и разборчивостью этикеток, уровнем жидкости во всевозможной таре и т. д. Примерно 10% этих задач выполняются системами трехмерного зрения. Отдельная область использования систем машинного зрения на производстве - проведение всевозможных визуальных измерений параметров технологических процессов и, в частности, определение размеров предметов, т.е. решение задач измерения .
· 20% спроса приходится на системы машинного зрения для проектов автоматизации производства и внедрения промышленных роботов. Такие системы машинного зрения упрощают самые разные виды высокоточной деятельности (сборка и разборка, фасовка, покраска, сварка, утилизация), облегчают транспортировку грузов, применяются в системах учета, маркировки, регистрации и сортировки продукции. Также инспекционные задачи и задачи расположения для правильной работы робота.
· 17% всех продаж систем машинного зрения составляют широко известные и хорошо работающие OCR/OCV-системы распознавания печатных символов и штрих-кодов. Решение задачи идентификации .
· Рынок систем машинного зрения для непроизводственных (развлекательных, бытовых, исследовательских) роботов составляет 13%.
Основные области применения машинного зрения
В статье Бобровского «Когда машины прозреют» [Бобровский, 2004] представлена следующая статистика областей, в которых востребованы системы машинного зрения:
· Небольшой процент рынка приходится на системы виртуальной реальности, предлагающие качественно новый интерфейс "человек - компьютер", основанный на распознавании лиц и жестов, на системы, обеспечивающие выполнение задач безопасности, смысловой анализ мультимедийных данных и т.д.
· Востребованы системы машинного зрения и в робототехнике. Эксперты полагают, что технологии машинного зрения - самый простой способ научить аппараты автономным действиям в естественном мире.
· Существенный спрос наблюдается со стороны сельскохозяйственных организаций, где необходима автоматизация деятельности по визуальному контролю и сортировке продуктов, однако пока системы машинного зрения показывают в данной области неудовлетворительные результаты.
· Отмечается рост интереса к системам машинного зрения со стороны нанотехнологических фирм, биотехнологических компаний и в сфере медицины (автоматический анализ медицинских изображений - рентген, томография, УЗИ)
· Востребовано машинное зрение и в области охранных систем (идентификация личности, детекторы движения, распознавание и отслеживание движущихся объектов, распознавание автомобильных номеров и т.д.);
· Системы машинного зрения востребованы в области контроля качества и инспекции продуктов питания (в настоящее время оценка качества бисквитов на кондитерской линии осуществляется со скоростью 60 пирожных в секунду), а также в области визуального контроля и управления (учет, считывание штрих-кодов).
· Машинное зрение применяется в системах распознавания рукописного и печатного текста.
УДК 004.93"1
Машинное зрение
Татьяна Вадимовна Петрова, группа 4241/3
Машинное зрение - это применение компьютерного зрения для промышленности и производства. Областью интереса машинного зрения являются цифровые устройства ввода/вывода и компьютерные сети, предназначенные для контроля производственного оборудования. Машинное зрение имеет некоторые преимущества перед зрением человека. Соответственно, актуально развивать это направление науки. В данном обзоре рассказывается об истории развития машинного зрения, компонентах системы машинного зрения, применении машинного зрения и будущем данной области науки.
Введение
компьютерный машинный зрение производственный
Основную часть информации о внешнем мире человек получает по зрительному каналу и далее весьма эффективно обрабатывает полученную информацию при помощи аппарата анализа и интерпретации визуальной информации. Поэтому встает вопрос о возможности машинной реализации данного процесса.
За счет возрастания сложности решаемых научно-технических задач, автоматическая обработка и анализ визуальной информации становятся все более актуальными вопросами. Данные технологии используются в весьма востребованных областях науки и техники, таких как автоматизация процессов, повышение производительности, повышение качества выпускаемых изделий, контроль производственного оборудования, интеллектуальные робототехнические комплексы, системы управления движущимися аппаратами, биомедицинские исследования и множество других. Кроме того, можно сказать, что успех современного бизнеса основывается главным образом на качестве предлагаемой продукции. А для его обеспечения, если говорить о производстве материальных вещей, требуется визуальный контроль.
Далее мы будем использовать термин «машинное зрение» (Machine vision) как понятие, наиболее полно объемлющее круг инженерных технологий, методов и алгоритмов, связанных с задачей интерпретации визуальной информации, а также как практическое использование результатов этой интерпретации.
1. История развития машинного зрения
Компьютерное зрение оформилось как самостоятельная дисциплина к концу 60х годов. Это направление возникло в рамках искусственного интеллекта в тот его период, когда еще были горячи споры о возможности создания мыслящей машины. Оно выделилось из работ по распознаванию образов. [Зуева, 2008]
Кратко история развития машинного зрения представлена на рисунке 1.
Рис. 1. История машинного зрения
В истории развития машинного зрения можно выделить следующие этапы:
· 1955 г. - профессор Массачусетского технологического института (МТИ) Оливер Селфридж опубликовал статью «Глаза и уши для компьютера». В ней автор выдвинул теоретическую идею оснащения компьютера средствами распознавания звука и изображения.
· 1958 г. - психолог Фрэнк Розенблатт из Корнеллского университета создал компьютерную реализацию персептрона (от perception - восприятие) - устройства, моделирующего схему распознавания образов человеческим мозгом. Персептрон был впервые смоделирован в 1958 году, причем его обучение требовало около получаса машинного времени на ЭВМ IBM-704. Аппаратный вариант - Mark I Perceptron - был построен в 1960 г. и предназначался для распознавания зрительных образов [Компьютерное зрение, 2010] .
Однако рассмотрение задач машинного зрения носило скорее умозрительный характер, так как ни техники, ни математического обеспечения для решения таких сложных задач еще не было.
· 1960-е гг.- появление первых программных систем обработки изображений (в основном для удаления помех с фотоснимков, сделанных с самолетов и спутников), стали развиваться прикладные исследования в области распознавания печатных символов. Однако все еще существовали ограничения в развитии данной области науки, такие как отсутствие дешевых оптических систем ввода данных, ограниченность и довольно узкая специализация вычислительных систем. Бурное развитие систем компьютерного зрения на протяжении 60-х годов можно объяснить расширением использования вычислительных машин и очевидной потребностью в более быстрой и эффективной связи человека с ЭВМ. К началу 60-х годов задачи компьютерного зрения в основном охватывали область космических исследований, требовавших обработки большого количества цифровой информации.
· 1970-е гг. - Лавренсе Робертс, аспирант МТИ, выдвинул концепцию машинного построения трехмерных образов объектов на основе анализа их двумерных изображений. На данном этапе стал проводиться более глубокий анализ данных. Начали развиваться различные подходы к распознаванию объектов на изображении, например структурные, признаковые и текстурные.
· 1979 г. - профессор Ганс-Хельмут Нагель из Гамбургского университета заложил основы теории анализа динамических сцен, позволяющей распознавать движущиеся объекты в видеопотоке.
· В конце 1980-х годов были созданы роботы, способные более-менее удовлетворительно оценивать окружающий мир и самостоятельно выполнять действия в естественной среде
· 80-е и 90-е годы ознаменовались появлением нового поколения датчиков двухмерных цифровых информационных полей различной физической природы. Развитие новых измерительных систем и методов регистрации двухмерных цифровых информационных полей в реальном масштабе времени позволило получать для анализа устойчивые во времени изображения, генерируемые этими датчиками. Совершенствование же технологий производства этих датчиков позволило существенным образом снизить их стоимость, а значит, значительно расширить область их применения
· С начала 90-х годов в алгоритмическом аспекте последовательность действий по обработке изображения принято рассматривать в согласии с так называемой модульной парадигмой. Эта парадигма, предложенная Д. Марром на основе длительного изучения механизмов зрительного восприятия человека, утверждает, что обработка изображений должна опираться на несколько последовательных уровней восходящей информационной линии: от «иконического» представления объектов (растровое изображение, неструктурированная информация) – к их символическому представлению (векторные и атрибутивные данные в структурированной форме, реляционные структуры и т. п.). [Визильтер и др., 2007]
· В середине 90-х годов появились первые коммерческие системы автоматической навигации автомобилей. Эффективные средства компьютерного анализа движений удалось разработать в конце XX века
· 2003 г. - на рынок были выпущены первые достаточно надежные корпоративные системы распознавания лиц.
2. Задачи машинного зрения и области его применения
2.1 Определение понятия «машинное зрение»
Машинное зрение - это применение компьютерного зрения для промышленности и производства. Областью интереса машинного зрения, как инженерного направления, являются цифровые устройства ввода/вывода и компьютерные сети, предназначенные для контроля производственного оборудования, таких как роботы-манипуляторы или аппараты для извлечения бракованной продукции.
Machine vision is the study of methods and techniques whereby artificial vision systems can be constructed and usefully employed in practical applications. As such, it embraces both the science and engineering of vision.
Its study includes not only the software but also the hardware environment and image acquisition techniques needed to apply it. As such, it differs from computer vision, which appears from most books on the subject to be the realm of the possible design of the software, without too much attention on what goes into an integrated vision system (though modern books on computer vision usually say a fair amount about the "nasty realities" of vision, such as noise elimination and occlusion analysis).
2.2 Машинное зрение в настоящее время.
В настоящее время существует четкая граница между так называемым монокулярным и бинокулярным компьютерным зрением. К первой области относятся исследования и разработки в области компьютерного зрения, связанные с информацией, поступающей от одной камеры или от каждой камеры отдельно. Ко второй области относятся исследования и разработки, имеющие дело с информацией, одновременно поступающей от двух и более камер. Несколько камер в таких системах используются для измерения глубины наблюдения. Эти системы называются стереосистемами.
К настоящему моменту теория компьютерного зрения полностью сложилась как самостоятельный раздел кибернетики, опирающийся на научную и практическую базу знаний. Ежегодно по данной тематике издаются сотни книг и монографий, проводятся десятки конференций и симпозиумов, выпускается различное программное и аппаратно-программное обеспечение. Существует ряд научно-общественных организаций, поддерживающих и освещающих исследования в области современных технологий, в том числе технологии компьютерного зрения.
2.3. Основные задачи машинного зрения
В целом, в задачи систем машинного зрения входит получение цифрового изображения, обработка изображения с целью выделения значимой информации на изображении и математический анализ полученных данных для решения поставленных задач.
Однако машинное зрение позволяет решать множество задач, которые условно можно разделить на четыре группы (Рис.2) [Лысенко, 2007] :

Рис.2. Задачи машинного зрения
· Распознавание положения
Цель машинного зрения в данном применении - определение пространственного местоположения (местоположения объекта относительно внешней системы координат) или статического положения объекта (в каком положении находится объект относительно системы координат с началом отсчета в пределах самого объекта) и передача информации о положении и ориентации объекта в систему управления или контроллер.
Примером такого приложения может служить погрузочно-разгрузочный робот, перед которым стоит задача перемещения объектов различной формы из бункера. Интеллектуальная задача машинного зрения заключается, например, в определении оптимальной базовой системы координат и ее центра для локализации центра тяжести детали. Полученная информация позволяет роботу захватить деталь должным образом и переместить ее в надлежащее место.
Измерение
В приложениях данного типа основная задача видеокамеры заключается в измерении различных физических параметров объекта.
Примером физических параметров может служить линейный размер, диаметр, кривизна, площадь, высота и количество. Пример реализации данного задачи - измерение различных диаметров горлышка стеклянной бутылки.
Инспекция
В приложениях, связанных с инспекцией, цель машинного зрения - подтвердить определенные свойства, например, наличие или отсутствие этикетки на бутылке, болтов для проведения операции сборки, шоколадных конфет в коробке или наличие различных дефектов.
Идентификация
В задачах идентификации основное назначение видеокамеры - считывание различных кодов (штрих-кодов, 2D-кодов и т. п.) с целью их распознавания средствами камеры или системным контроллером, а также определение различных буквенно-цифровых обозначений. Кроме того к задачам данной группы можно отнести системы, выполняющие задачи безопасности, такие как идентификация личности и техники, детекторы движения.
Исходя из задач, которые решает машинное зрение, можно выделить множество областей применения машинного зрения. Однако стоит отметить, что сегодняшняя структура спроса определяется пока еще ограниченными возможностями современных систем машинного зрения.
Ниже приведена структура рыночного спроса по проектной тематике (Рис.3) [Бобровский, 2004] :

Рис.3. Структура рыночного спроса
· 50% всех систем машинного зрения эксплуатируются в задачах контроля качества, т.е. решают инспекционные задачи машинного зрения. Это прежде всего визуальный контроль за процессом сборки, цветом и качеством поверхности продукции, внешним видом и чистотой упаковки, правильностью и разборчивостью этикеток, уровнем жидкости во всевозможной таре и т. д. Примерно 10% этих задач выполняются системами трехмерного зрения. Отдельная область использования систем машинного зрения на производстве - проведение всевозможных визуальных измерений параметров технологических процессов и, в частности, определение размеров предметов, т.е. решение задач измерения .
· 20% спроса приходится на системы машинного зрения для проектов автоматизации производства и внедрения промышленных роботов. Такие системы машинного зрения упрощают самые разные виды высокоточной деятельности (сборка и разборка, фасовка, покраска, сварка, утилизация), облегчают транспортировку грузов, применяются в системах учета, маркировки, регистрации и сортировки продукции. Также инспекционные задачи и задачи расположения для правильной работы робота.
· 17% всех продаж систем машинного зрения составляют широко известные и хорошо работающие OCR/OCV-системы распознавания печатных символов и штрих-кодов. Решение задачи идентификации .
· Рынок систем машинного зрения для непроизводственных (развлекательных, бытовых, исследовательских) роботов составляет 13%.
2.4 Основные области применения машинного зрения
В статье Бобровского «Когда машины прозреют» [Бобровский, 2004] представлена следующая статистика областей, в которых востребованы системы машинного зрения:
· Небольшой процент рынка приходится на системы виртуальной реальности, предлагающие качественно новый интерфейс "человек - компьютер", основанный на распознавании лиц и жестов, на системы, обеспечивающие выполнение задач безопасности, смысловой анализ мультимедийных данных и т.д.
· Востребованы системы машинного зрения и в робототехнике. Эксперты полагают, что технологии машинного зрения - самый простой способ научить аппараты автономным действиям в естественном мире.
· Существенный спрос наблюдается со стороны сельскохозяйственных организаций, где необходима автоматизация деятельности по визуальному контролю и сортировке продуктов, однако пока системы машинного зрения показывают в данной области неудовлетворительные результаты.
· Отмечается рост интереса к системам машинного зрения со стороны нанотехнологических фирм, биотехнологических компаний и в сфере медицины (автоматический анализ медицинских изображений – рентген, томография, УЗИ)
· Востребовано машинное зрение и в области охранных систем (идентификация личности, детекторы движения, распознавание и отслеживание движущихся объектов, распознавание автомобильных номеров и т.д.);
· Системы машинного зрения востребованы в области контроля качества и инспекции продуктов питания (в настоящее время оценка качества бисквитов на кондитерской линии осуществляется со скоростью 60 пирожных в секунду), а также в области визуального контроля и управления (учет, считывание штрих-кодов).
· Машинное зрение применяется в системах распознавания рукописного и печатного текста.
3. Техническая составляющая машинного зрения
3.1 Методы обработки изображения
В системах машинного зрения, для решения перечисленных задач, используются различные технологии и методы. Ниже перечислены основные методы обработки изображения:
· Счетчик пикселей : подсчитывает количество светлых или темных пикселей и на основе результата делает необходимые выводы об изображении.
· Выделение связанных областей : Связная область изображения – это, с одной стороны, тип объекта, все еще очень близко связанный с растровым изображением, и в то же время – это уже некая самостоятельная семантическая единица, позволяющая вести дальнейший геометрический, логический, топологический и любой другой анализ изображения
· Бинаризация : преобразует изображение в серых тонах в бинарное (белые и черные пиксели).
· Гистограмма и гистограммная обработка: Гистограмма характеризует частоту встречаемости на изображении пикселей одинаковой яркости.
· Сегментация : используется для поиска и/или подсчета деталей. Сегментацией изображения называется разбиение изображения на непохожие по некоторому признаку области. Предполагается, что области соответствуют реальным объектам, или их частям, а границы областей соответствуют границам объектов.
· Чтение штрих-кодов : декодирование 1D и 2D кодов, разработанных для считывая или сканирования машинами
· Оптическое распознавание символов: автоматизированное чтение текста, например, серийных номеров
· Измерение : измерение размеров объектов в дюймах или миллиметрах
· Сопоставление шаблонов : поиск, подбор, и/или подсчет конкретных моделей
· Инвариантные алгоритмы сопоставления точечных особенностей на изображениях: обнаружения и сопоставление точечных особенностей на изображениях.
· Методы идентификация личности по радужной оболочке глаза
· Различные методы восстановления формы объекта по изображениям
В большинстве случаев, системы машинного зрения используют последовательное сочетание этих методов обработки для выполнения полного инспектирования. Например, система, которая считывает штрих-код может также проверить поверхность на наличие царапин или повреждения и измерить длину и ширину обрабатываемых компонентов.
3.2 Компоненты системы
Типовая система машинного зрения состоит из одной или нескольких цифровых или аналоговых камер (черно-белые или цветные) с подходящей оптикой для получения изображений, подсветки и объекта (рис. 4), оборудования ввода/вывода или каналы связи для доклада о полученных результатах. Кроме того, важна и программная составляющая систем машинного зрения, а именно программное обеспечение для подготовки изображений к обработке (для аналоговых камер это оцифровщик изображений), специфичные приложения программного обеспечения для обработки изображений и обнаружения соответствующих свойств.

Рис.4. Состав типовой системы машинного зрения
Матрица чувствительных элементов , входящих в состав видеокамеры, предназначена для получения цифрового изображения. В состав матрицы чувствительного элемента входит множество аналого-цифровых преобразователей, предназначенных для преобразования информации о световой интенсивности в цифровое значение.
Объектив позволяет камере фокусироваться на определенном расстоянии и получать четкое изображение объекта. В случае, когда объект находится вне фокусного расстояния, изображение получается нерезким (размытым, с нечеткими краями), что ухудшает возможность обработки видеоряда. В отличие от обычных цифровых фотоаппаратов с объективами, поддерживающими функции автофокусировки, в машинном зрении применяется оптика с фиксированным фокусным расстоянием или ручной настройкой фокуса. Существуют различные типы объективов для самых разных задач (стандартные, телескопические, с широким углом обзора, с увеличением и другие), и выбор правильного типа оптики - важный этап при проектировании системы машинного зрения.
Подсветка - еще один важный элемент в машинном зрении. Благодаря использованию различных типов освещения можно расширить круг задач, решаемых машинным зрением. Существует различные типы подсветок, но наиболее популярным является светодиодная - в связи с ее высокой яркостью. При этом современный уровень развития светодиодной техники обеспечивает большой срок службы устройства и малое энергопотребление.
3.3. Принципы функционирования систем машинного зрения
Последовательность действий, выполняемых системой машинного зрения, можно представить в следующем виде:

Рис.5. Последовательность действий системы машинного зрения
Изображение, полученное с камеры, попадает в захватчик кадров или в память компьютера. Захватчик кадров - это устройство, которое преобразует выходные данные с камеры в цифровой формат (как правило, это двумерный массива чисел) и размещает изображения в памяти компьютера, так чтобы оно могло быть обработано с помощью программного обеспечения для машинного зрения.
Программное обеспечение, как правило, совершает несколько шагов для обработки изображений. Часто изображение для начала обрабатывается с целью уменьшения шума или конвертации множества оттенков серого в простое сочетание черного и белого (бинаризации). После первоначальной обработки программа будет считать, производить измерения и/или определять объекты, размеры, дефекты и другие характеристики изображения. В качестве последнего шага, программа пропускает или забраковывает деталь в соответствии с заданными критериям. Если деталь идет с браком, программное обеспечение подает сигнал механическому устройству для отклонения детали; другой вариант развития событий, система может остановить производственную линию и предупредить человека работника для решения этой проблемы, и что привело к неудаче. Хотя большинство систем машинного зрения полагаться на «черно-белые» камеры, использование цветных камер становится все более распространенным явлением. Кроме того, все чаще системы машинного зрения используют цифровые камеры прямого подключения, а не камеры с отдельным захватчиком кадров, что сокращает расходы и упрощает систему.
4. Смежные области
Машинное зрение относится к инженерным автоматизированным системам визуализации в промышленности и на производстве, и в этом качестве машинное зрение, связано с самыми разными областями компьютерных наук: компьютерное зрение, оборудования для управления, базы данных, сетевые системы и машинное обучение.
Не стоит путать машинное и компьютерное зрения. Компьютерное зрение является более общей областью исследований, тогда как машинное зрение является инженерной дисциплиной связанной с производственными задачами.
Рассмотрим подробнее смежные науки и их взаимодействие с машинным зрением.
4.1. Компьютерное зрение
Компьютерное зрение представляет собой научную дисциплину, изучающую теорию и базовые алгоритмы анализа изображений и сцен.
Машинное зрениеследует рассматривать как гораздо более комплексную и технологическую область научных и инженерных знаний, охватывающую все проблемы разработки практических систем: выбор схем освещения исследуемой сцены, выбор характеристик датчиков, их количества и геометрии расположения, вопросы калибровки и ориентирования, выбор или разработка оборудования для оцифровки и процессорной обработки, разработка собственно алгоритмов и их компьютерная реализация – то есть весь круг сопутствующих задач.
Кроме того, фигурирует такое понятие как зрение роботов. Это более узкая область технологий машинного зрения, а именно часть, которая обеспечивает функционирование систем машинного зрения в условиях жестких временных ограничений. Например, оборудуя роботов нового поколения мобильными камерами и алгоритмами стереовидения, многие компании работают над созданием интеллектуальных роботов, способных не только свободно ориентироваться в квартире и узнавать своих хозяев, но и выполнять определенные задачи по дистанционно подаваемым командам.
4.2. Обработка и анализ изображений
Обработка изображений - любая форма обработки информации, для которой входные данные представлены изображением, например, фотографиями или видеокадрами. Обработка изображений может осуществляться как для получения изображения на выходе, так и для получения другой информации (например, распознание текста, подсчёт числа и типа клеток в поле микроскопа и т. д.). Кроме статичных двухмерных изображений, обрабатывать требуется также изображения, изменяющиеся со временем, например видео.
В последнее время традиционный термин «обработка изображений » чаще употребляется не как обозначение научной дисциплины, а как указатель на предметную область. Наметилась также тенденция использования этого термина для обозначения обработки нижнего уровня, когда результатом обработки изображения снова является изображение. В то же время термин «понимание изображений » употребляется для обработки верхнего уровня.
Цифровая фотограмметрия , бурно развивающаяся в последние годы дисциплина, пришла на смену аналитической фотограмметрии. В то время как классическая аналитическая фотограмметрия изучала в основном метрические соотношения между точками снимков и реальной сцены, современная цифровая фотограмметрия ставит самые сложные задачи анализа и 3D"описания сцены по видеоданным оптических сенсоров. Цифровая фотограмметрия концентрируется прежде всего не на вопросах «понимания» сцены или обнаружения объектов, а на вопросах высокоточного измерения различных ее элементов и реконструкции форм трехмерных поверхностей с использованием стерео и многокамерной съемки, а также специального структурированного подсвета.
4.3. Машинное обучение
Машинное обучение - обширный подраздел искусственного интеллекта, изучающий методы построения алгоритмов, способных обучаться. Целью машинного обучения является частичная или полная автоматизация решения сложных профессиональных задач в самых разных областях человеческой деятельности. Машинное обучение имеет широкий спектр приложений, среди которых есть приложения распознавания изображений - область, которой занимается машинное зрение.
5. Наиболее интересные примеры систем машинного зрения
5.1. Видеонаблюдение
Автоматические и автоматизированные системы видеонаблюдения являются одной из ключевых составляющих современных комплексных систем безопасности. Задача видеонаблюдения подразумевает визуальный контроль заданной области пространства при помощи одной или нескольких видеокамер, позволяющий сохранять и просматривать цифровые видеоданные, а также постоянно оценивать состояние контролируемой территории, выделяя так называемые охранные события.
Охранное видеонаблюдение сегодня имеет два самых важных направления развития - полный переход на цифровые системы видеонаблюдения и развитие функций видеоаналитики. Цифровое (IP) видеонаблюдение предполагает отказ от аналоговых камер и средств передачи данных. Видеоаналитика представляет развитие функций систем видеонаблюдения, позволяя сократить объем регистрируемых данных.
Современная система видеонаблюдения включает в себя значительное количество различных технологий компьютерного зрения. Технология интеллектуального видеонаблюдения должна включать следующие основные элементы и программно-алгоритмические модули:
Визуальные датчики различного типа для дистанционного видеонаблюдения
Средства распределенного сбора информации, сжатия, обработки и передачи цифровой видеоинформации по локальным и глобальным сетям в реальном времени
Автоматическое выделение объектов интереса (люди, транспортные средства, другие объекты)
· автоматическое слежение за движущимися объектами в зоне наблюдения
· биометрическое распознавание персонала, биометрический контроль доступа в критические зоны объекта наблюдения
Автоматическую идентификацию транспортных средств, грузов и оборудования на основе распознавания идентификационных меток (регистрационных номеров, штриховых кодов, других технологических маркировок)
Методы оценки сценариев поведения наблюдаемых объектов и групп объектов
Формирование «тревожных» сообщений оператору в случае реализации неблагоприятных или нестандартных сценариев развития событий в зоне видеонаблюдения
· программно-аппаратные средства для реализации методов и алгоритмов сбора и обработки видеоинформации.
Рассмотрим ряд примеров создания систем видеонаблюдения и их элементов.
5.1.1. Система обнаружения и сопровождения движущихся объектов по признаку их движения
Технология детектирования движения в поле зрения камеры, или motion detection, стала одной из первых коммерческих технологий на потребительском рынке Web-камер [Морзеев, 2002] . Принцип работы технологии очень простой, поскольку предполагается, что камера неподвижна, а следовательно, неподвижен и фон. Движутся только объекты. Хотя существуют и такие технологии, которые позволяют детектировать движущиеся объекты на движущемся фоне.
Разработанная в ИИТ (Институт информационных технологий) система предназначена для автоматического выделения и сопровождения малоразмерных объектов по признаку их движения на изображениях, получаемых с подвижной видеокамеры.
Система, реализованная на базе персонального компьютера, осуществляет ввод с видеокамеры, визуализацию и обработку цифровых изображений движущихся сцен в реальном времени. Система производит оценку и компенсацию общего сдвига изображения сцены, происходящего за счет собственного относительного движения приемника изображения, а также выделение движущихся малоразмерных объектов по признаку их движения и одновременное сопровождение движения нескольких обнаруженных объектов. На рис.6 показаны: слева – кадр видеопоследовательности с выделенными движущимися объектами; справа – стадии выделения движущихся объектов.

Рис.6. Выделение движущихся объектов сцены наблюдения
У систем обнаружения и сопровождения движущихся объектов могут быть различные функции, такие как:
Обнаружение новых объектов сцены наблюдения;
Обнаружение пропавших объектов сцены наблюдения;
Регистрация новой сцены наблюдения;
Контроль отсутствия сдвигов камеры относительно сцены наблюдения.
5.1.2. Система считывания регистрационных номеров автомобилей
Как уже говорилось, одной из функций систем видеонаблюдения является считывание идентификационных меток объектов, прежде всего – номеров транспортных средств, пересекающих зону наблюдения.
Одним из типовых приложений такого рода является разработанная в ИИТ система выделения и распознавания номерных знаков автомашин в потоке на автомагистрали. Система считывания автомобильных номеров реализована на базе системы видеонаблюдения «Интеллект» фирмы ITV и внедрена на ряде зарубежных автомобильных трасс [Визильтер и др., 2007] .
Функции системы:
Регистрация появления автомобиля (подсчет автомобилей);
Выделение номерного знака;
Распознавание символов номерного знака;
Сохранение распознанного номера в базе данных.
5.2 Биометрия
В последние годы во всем мире наблюдается все возрастающий интерес к методам распознавания и идентификации личности. Основные пути и способы решения этих задач лежат в области разработки биометрических систем. В биометрических системах для распознавания человека используется совокупность биометрических характеристик, основанных на биологических особенностях человеческого тела. В качестве таких биометрических характеристик могут выступать голос, почерк, отпечатки пальцев, геометрия кисти руки, рисунок сетчатки или радужной оболочки глаза, лицо и ДНК.
Биометрическая защита более эффективна в сравнении с такими методами, как использование паролей, PIN-кодов, смарт-карт поскольку биометрия позволяет идентифицировать именно конкретного человека, а не устройство. Традиционные методы защиты не исключают возможности потери или кражи информации, вследствие чего она становится доступной незаконным пользователям. Уникальный биометрический идентификатор, каковым является, например, отпечаток пальца или изображение лица, служит ключом, который невозможно потерять.
Биометрическая система безопасности позволяет отказаться от парольной защиты либо служит для ее усиления. Одной из основных причин, которые существенно повысили значимость автоматической обработки и анализа биометрической информации, явилось повышение требований к функциональным возможностям автоматических систем безопасности, расположенных в общественных местах (вокзалы, супермаркеты и т. п.)
Рассмотрим несколько примеров биометрических приложений, встречающихся на практике.
5.2.1. Система обнаружения и распознавания лиц
В ИИТ разработана технология обнаружения и распознавания лиц по двумерным изображениям, включающая три основных модуля:
Детектирование (обнаружение) лиц;
Индексация (кодирование и последующий быстрый поиск лиц в базе);
Идентификация лиц.
Модули применяются последовательно. Выделенные на текущем кадре изображения лиц поступают в систему индексации, которая в ответ указывает заданное количество «кандидатов» из хранящейся базы изображений лиц, наиболее похожих на текущее изображение. После этого процедура идентификации обрабатывает изображения лиц найденных кандидатов с целью их точного распознавания. Такой подход позволяет осуществлять полнофункциональную работу с «живым» видеопотоком с целью выделения и распознавания лиц по значительным объемам банков изображений в режиме, близком к режиму реального времени.
На рисунке 7 показаны составляющие описанной выше технологии обнаружения и распознавания лиц.

Рис.7. Система обнаружения и распознавания лиц
Показаны: текущее видеоизображение (слева вверху), результат выделения лица (справа вверху); результат поиска в индексированной базе изображений лиц (второй ряд изображений – найденные «кандидаты», среди которых могут быть и ложные); результат окончательной идентификации лица (третий ряд изображений – показаны только «кандидаты», успешно прошедшие идентификацию).
5.2.2. Система распознавания жестов руки человека
Распознавание жестов представляет собой обширную область приложений компьютерного зрения. Под «жестами» в широком смысле понимаются любые движения человеческого тела. В узком смысле обычно подразумеваются некоторые характерные движения рук человека, имеющие в определенной предметной области какие-либо определенные семантические значения. Распознавание жестов может использоваться для построения различного рода человеко-машинных интерфейсов, управления различными техническими средствами и системами виртуальной реальности.
В качестве простого примера можно рассмотреть систему распознавания жестов руки человека по изображениям от черно-белой видеокамеры низкого разрешения (рис.8). Система не требует предварительного обучения и устойчиво различает до 10 различных жестов

Рис.8. Простой пример системы распознавания жестов
5.3 Медицинские приложения
Особое место в области разработки систем компьютерного зрения занимают задачи медицинской диагностики. Основные задачи, которые должны решать здесь данные технологии, следующие: задача измерения объектов на рентгенограммах, компьютерных томограммах и современных цифровых ультразвуковых приборах, задача улучшения визуализации, задача восстановления трехмерных форм объектов. Наиболее современной и бурно развивающейся в области разработки медицинских диагностических приложений можно считать технологию, связанную с определением степени алкогольного и наркотического опьянения на основе анализа реакции зрачка пациента.
5.3.1. Системы для компьютерного анализа томографических изображений
При создании систем анализа томографических изображений общего назначения основной акцент делался на разработку процедур автоматической и полуавтоматической сегментации изображений. Реализованная схема алгоритма сегментации включает:
Первичную гистограммную сегментацию методом статистического выделения мод;
Формирование связных областей с заданными характеристиками методом слияния/разбиения.
Специально разработанный для данного класса задач метод статистического выделения мод позволяет оценивать количество и степень выраженности мод гистограммы (рис.9), опираясь на соответствующий график статистической производной.

Рис.9. Пример автоматического разделения мод на гистограмме
Метод слияния/разбиения связных областей использует полученную на первом этапе разметку пикселей изображения в качестве стартового приближения, после чего происходит процесс итеративной релаксации с целью минимизации заданной энергетической функции. Алгоритм сегментации может быть использован как в автоматическом, так и в полуавтоматическом режиме. В этом случае врач-оператор может инициализировать процесс сегментации интересующих его объектов путем указания интересующих его точек.
6. Будущее машинного зрения.
6.1. Достоинства и недостатки систем машинного зрения
Главным недостатком систем машинного зрения, заметно ограничивающим рост их рынка, считается отсутствие единых стандартов на оборудование и программные интерфейсы. Пользователи систем постоянно жалуются на невозможность использовать системы разных производителей, а интеграционные продукты в этой области стоят недешево. Кроме того, по мере улучшения качества сканируемого изображения будет расти нужда в эффективном системном ПО для быстрого захвата видеоданных, их очистки, сжатия и хранения. Если со временем такие функции будут реализованы аппаратно, можно предсказать рост спроса на встраиваемые системы машинного зрения.
Многообещающей выглядит концепция мультиспектральных систем машинного зрения, обрабатывающих изображения не только в области видимого человеком спектра, но и получаемых с помощью радарных или лазерных установок, а также инфракрасных камер (есть примеры применения систем машинного зрения при распознавании тепловых полей людей в охранных системах и при анализе качества горячих булочек в кондитерской промышленности). Основная помеха на этом пути развития машинного зрения - дороговизна и сложность эксплуатации соответствующих датчиков.
Продолжительна и сложна процедура калибровки систем машинного зрения при настройке на определенную предметную область. Нередко она требует значительного времени и вычислительных ресурсов для обучения нейронной сети. Прикладное ПО также нередко отличается неудобным интерфейсом, а перенастройка системы на новую номенклатуру, да еще в реальном масштабе времени, на чем нередко настаивает пользователь, чаще всего невозможна. Покупателям же уже нужны системы, способные анализировать продукцию на конвейере не поштучно, а разом - осматривая все, что находится в данный момент времени на ленте, и мгновенно оценивая состояние всех изделий.
Ощущается нехватка хороших математических алгоритмов, ориентированных на компьютеры с высокой производительностью и поддерживающих параллельную обработку. Остается пока нерешенной проблема распознавания схожих, но по-разному освещенных объектов, и вряд ли с ней удастся справиться в обозримом будущем.
Негативно сказываются на рынке завышенные ожидания потребителей, не очень высокая прибыльность уже существующих систем, небольшое число хороших продуктов, а также возможность решать производственные задачи другим путем - без систем машинного зрения, с помощью дешевого персонала.
Но все эти проблемы временные. Ведущие поставщики уже договариваются о единых стандартах, для чего планируется создать общедоступный репозиторий знаний и типовых шаблонов продуктов, определить программные интерфейсы, а также выработать соглашение по языкам описания и представления данных систем машинного зрения [Бобровский, 2004].
Интерес к системам машинного зрения во многом поддерживается успехами машин в тех областях, где они намного превосходят человека по своим возможностям. Так, компьютер способен выявлять в изображении тысячи градаций серого и различать миллионы цветов, очень быстро решать типовые и хорошо формализуемые задачи распознавания и определять мелкие детали изображений. А растущая вычислительная мощь дешевых процессоров стимулирует выпуск общедоступных бытовых и промышленных "зрячих" роботов, управляемых обычным ПК.
Производители электронных систем безопасности рассчитывают научить системы машинного зрения автоматической классификации объектов. Хорошая система будет выявлять в видеоизображении все виды автомобильной техники и определять их марки, отыскивать в толпе конкретных людей, отслеживать траектории перемещения отдельных лиц и даже движения частей их тел, предсказывая возможное поведение, и т. д.
Мэтт Аллен, руководитель направления из компании Microscan, так описывает достоинства систем машинного зрения: "Сегодняшние технологии оперативных поставок и производства по заказу превратили информацию в один из самых ценных активов компании. Системы машинного зрения являются основой, позволяющей осуществлять автоматизацию многих производственных процессов. В качестве средств сбора данных системы машинного зрения используются в таких областях, как высокоскоростная сортировка, контроль качества продукции и слежение за ходом работ".
6.2 Будущее машинного зрения
Машинное зрение имеет все шансы превзойти человеческое в ближайшие десять лет. Уже сейчас роботы видят сквозь стены и на километры вперед. Последний бастион - расшифровка видеоинформации - скоро падет. В строй встанут роботы-автомобили, роботы-поезда и роботы-самолеты. А еще - доктора, скальпель которых никогда не сорвется, а зоркий глаз вовремя заметит артерию.
Остается надеяться, что люди сумеют направить мощь машинного зрения в верное русло, а не станут в спешном порядке конструировать терминаторов [Талан, 2007] .
У систем машинного зрения достаточно хорошие перспективы. Идеальная система машинного зрения будет полностью построена на цифровых технологиях, станет использовать интеллектуальные камеры и недорогое оборудование, реализующее набор стандартизованных функций обработки и распознавания изображений. Ключевым в ее успехе будет, конечно, удобная интеллектуальная программная среда, способная гибко и быстро настраиваться на произвольную предметную область, допускающая динамическое расширение функциональных возможностей и легко стыкующаяся с технологической аппаратурой.
По мнению Хирохисы Хирукавы, исследователя из Национального института перспективных научных исследований и технологий, производство роботов в XXI веке может стать крупнейшей отраслью промышленности - подобно производству автомобилей в XX столетии. При этом уже к 2025-му, в крайнем случае к 2050 году стоит ожидать массового распространения роботов, служащих для выполнения домашних работ[Морзеев, 2002].
Боб Таплетт, руководитель проектного отдела компании Microscan, говорит следующее: "Полагаю, можно утверждать, что в будущем системы машинного зрения превратятся в системы сбора данных. Считыватели штрих-кодов уйдут в прошлое, и в значительной мере это будет обусловлено тем, что системы машинного зрения способны решать гораздо больший круг задач".
Заключение
Машинное зрение достаточно неоднозначная тематика. С одной стороны, в этой области получены впечатляющие результаты и решены многие поставленные задачи. Системы машинного зрения справляются с автоматизацией производства, видеонаблюдением, анализом медицинских снимков. С другой стороны, машинному зрению все еще далеко до человеческого. Многие высоты достигнуты, многие еще впереди. Поэтому существует два взгляда на развитие машинного зрения. Одни говорят, что машины достигнут небывалых высот и разовьют огромную мощь, опередят человека. Другие утверждают, что машины никогда не превзойдут человека и машинное зрение так и останется непригодным для решения некоторых проблем, где необходимо вмешательство человека.
Несовершенство машинного зрения обусловлено отчасти техническими причинами, однако идет бурное развитие информационных технологий и находится все больше решений технических проблем.
Системы машинного зрения становятся все более актуальны, так как призваны решать наиболее актуальные проблемы человечества, такие как безопасность, медицинские вопросы, вопросы качества продукции.
Список литературы
· [Бобровский, 2004] Бобровский С. «Когда машины прозреют» - http://www.pcweek.ru/themes/detail.php?ID=66663&sphrase_id=12198
· [Визильтер и др., 2007] Визильтер Ю. В., Желтов С. Ю., Князь В. А., Ходарев А. Н., Моржин А. В. Обработка и анализ цифровых изображений с примерами на LabVIEW IMAQVision. – М.: ДМК Пресс, 2007.
· [Зуева, 2008] Зуева Е.Ю. «Компьютерное зрение в ИПМ им. В.М. Келдыша РАН – история развития» - http://www.keldysh.ru/papers/2009/art04/Zueva_09.htm
· [Катыс, 1990] Катыс Г.П. Обработка визуальной информации. – М.: Машиностроение, 1990г.
· [Компьютерное зрение ] Компьютерное (машинное) зрение (computer vision) http://es-prof.com/m_mvision.php
· [Лысенко, 2007] Лысенко О. Машинное зрение от SICK/IVP // Компоненты и технологии. 2007. № 1
· [Морзеев, 2002] Морзеев Ю. "Зачем компьютеру зрение" - http://www.compress.ru/article.aspx?id=10656&iid=434
· [Талан, 2007] Талан А. Перспективы машинного зрения, 2007 - http://www.mirf.ru/Articles/art2170.htm
· Davies E. R. Machine Vision: Theory, Algorithms, Practicalities. Academic Press, 2004.
· Computer Vision - http://www.graphicon.ru/oldgr/ru/library/cv/cv_intro.html
· [ Wikipedia , 2010] Машинное зрение - http://en.wikipedia.org/wiki/Machine_vision



